
انواع روش های راه اندازی موتور پله ای (استپر)
۳۰ شهریور ۱۳۹۷ربات اسکرا
۳۰ شهریور ۱۳۹۷
اصول مربوط به ربات دوپا (انسان نما)
اصطلاحات رایج
همانطور که در شکل زیر دیده میشود، حرکت ربات دوپا را میتوان در صفحههای مختلفی درنظر گرفت: صفحه طولی (sagittal)، صفحه جانبی (frontal) و صفحه عرضی (transverse).

شکل ۱: صفحههای مختلف درنظر گرفته شده در حرکت ربات دوپا
به صورت کلی رباتهای دو پا از دو زنجیرهی باز سینماتیکی پاها تشکیل شدهاند که به بدنه اصلی متصل است. اجزای دیگری مانند بالاتنه، دستها و سر نیز ممکن است وجود داشته باشد ولی ترکیب اصلی که رباتهای دو پا با آن شناخته میشوند همین پاها هستند. پاها معمولاً متقارنند و از سه قسمت ران، ساق و کف پا تشکیل شدهاند. بسته به تماس پاها با زمین دو حالت برای ربات میتوان در نظر گرفت: فاز تک تکیهگاهی Single Support Phase و فاز دو تکیهگاهی Double Support Phase. حالتی که یکی از کف پاها با زمین در تماس باشد فاز تک تکیهگاهی خوانده میشود و به این پا، پای تکیهگاه یا Stance Leg و به پای دیگر پای معلق Swing Leg گفته میشود، (شکل ۲-الف). و به حالتی که دو پا در تماس با زمین باشند، حالت دو تکیهگاهی گفته میشود، (شکل ۲-ب).
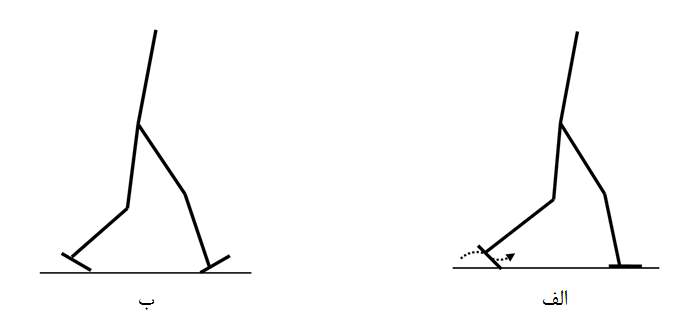
شکل ۲: فازهای مختلف حرکت ربات دوپا، (الف) فاز تک تکیهگاهی و (ب) فاز دو تکیهگاهی
انواع رباتها از نظر استفاده از عملگر
به طور کلی راه رفتن ربات دو پا را از نظر استفاده از عملگرها میتوان به دو دسته تقسیم کرد:
راه رفتن فعال و راه رفتن غیر فعال
الف- راه رفتن فعال:
در ایننوع، عامل اصلی حرکت محرکهای داخلی یا به عبارت دیگر همان موتورها و عملگرهای خطی هستند. حرکت بیشتر رباتها بر این اساس صورت میگیرد. در این نوع حرکت از تکرار منحنیهای از پیش تعیین شده برای حرکت ربات استفاده میشود.
ب- راه رفتن غیر فعال:
یکی از مشکلات در زمینه ساخت ربات دو پای فعال مصرف بالای انرژی آنهاست. به عنوان مثال ربات P3 شرکت هوندا ۱۳۰ کیلوگرم وزن دارد و توان مصرفی آن در طول حرکت ۲ کیلووات است. این توان ۲۰ برابر بیشتر از توانی است که یک انسان با همین وزن هنگام راه رفتن استفاده میکند. با این که مقدار زیادی از این انرژی ناشی از اصطکاک است اما قسمت بزرگی از آن هم ناشی از روش کنترل بر اساس ترژکتوریهای از پیش تعیین شده است. بر اساس این روش با وارد کردن نیرو به وسیله عملگرها ربات در مقابل دینامیک طبیعی آن کنترل میشود.
ایده ساخت ربات دو پا بدون استفاده از عملگر اولین بار توسط موچون (Mochon) و مک ماهون (McMahon) ارائه شد. آنها با تحقیق بر روی راه رفتن انسان پیبردند که ماهیچههای پای معلق در فاز تک تکیهگاهی فقط در ابتدا و انتهای فاز فعال هستند. نوع راه رفتن پیشنهادی آنها که راه رفتن پرتابهای خوانده میشد به این ترتیب بود که شرایط اولیهای به پای معلق داده میشد و سپس ربات فقط تحت اثر نیروی وزن خود و شرایط اولیه داده شده به سیستم حرکت میکرد.
اما ایده اصلی ربات بدون عملگر و آن چیزی که به آن راه رفتن غیرفعال میگوییم توسط مک گیر (McGeer) در سال ۱۹۹۰ ارائه شد. بر این اساس راه روندگان غیر فعال به دستهای از ماشینها اطلاق میشد که میتوانند بدون استفاده از هیچ سنسور، عملگر و کنترلی از یک سطح با شیب کم و فقط بر اساس نیروی وزن خود به صورت نرم و پایدار به سمت پایین حرکت کنند. او روشی برای تحلیل پایداری این ربات مطرح کرد و نمونههایی را نیز بر اساس ایده خود ساخت. بعد از آن بود که افراد زیادی به گسترش ایده و مدل مک گیر پرداختند. (شکل ۳)

شکل ۳: ربات دوپا غیر فعال ساخته شده توسط دانشگاه کرنل
یکی از چالشهای اصلی در زمینه راه رفتن غیرفعال، ایجاد ارتباط بین راه رفتن فعال و غیرفعال است. به عبارت دیگر استفاده از دینامیک طبیعی سیستم (مانند نیروی وزن) همراه با یک کنترل فعال است تا علاوه بر داشتن سیستمی پایدار بازده انرژی سیستم نیز بالا رود. (شکل ۴)

شکل ۴: سه ربات دوپا دارای عملگر که بر اساس حرکت غیر فعال ساخته شده است. (الف) ربات دانشگاه Cornell، (ب) ربات دانشگاه Delft و (پ) ربات دانشگاه MIT،
{kind=link}
{kind=link}
{kind=link}