
محاسبه نسبت گیربکس
۱۳ خرداد ۱۴۰۱خواندن پلاک الکتروموتورهای سه فاز
۱۳ خرداد ۱۴۰۱
۱- مقدمهای بر خواندن دیتا شیت موتور دی سی
موتورهای دی سی به دلیل ساختار ساده و راهاندازی آسان به وفور در صنایع مختلف استفاده میشوند. برای اینکه موتور دی سی متناسب با کاربرد خود را به درستی انتخاب نمایید باید بتوانید دیتاشیت یک موتور دی سی را به خوبی متوجه شوید. شکل ۱ دیتاشیت موتورهای دی سی ۲۵۰ وات شرکت Maxon سوئیس را نشان میدهد. در این مقاله با پارامترهای موجود در دیتا شیت و روش خواندن دیتاشیت یک موتور دیسی بیشتر آشنا خواهیم شد.
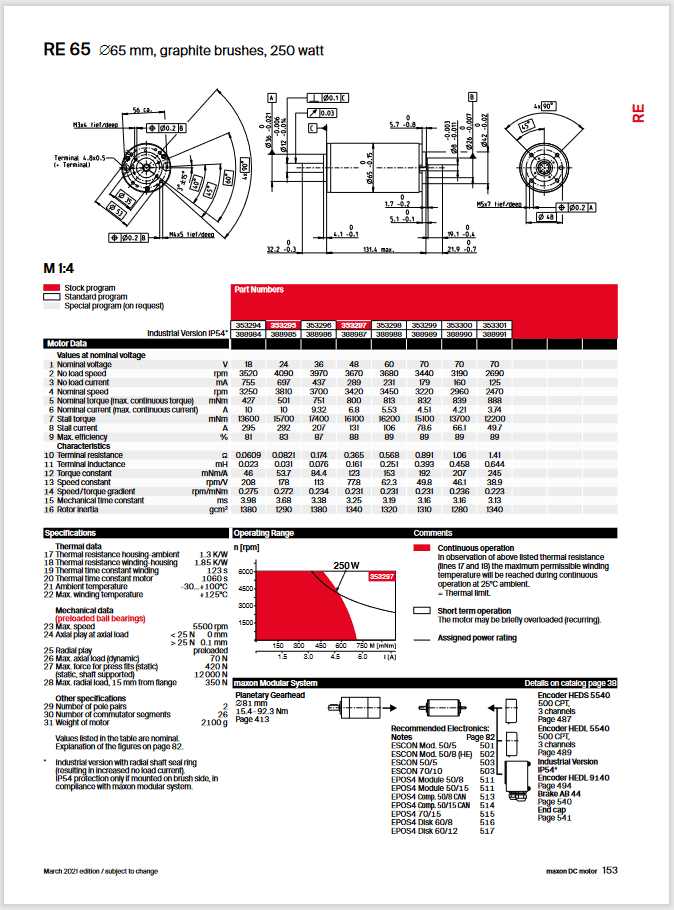
شکل ۱: دیتاشیت یک موتور دی سی ساخت شرکت Maxon سوئیس
۲- مهمترین «مشخصات الکتریکی» در هنگام خواندن دیتاشیت موتور دیسی
مشخصات الکتریکی دیتاشیت شکل ۱ در جدول ۱ نشان داده شده است. در ادامه این مشخصات را به صورتی کاربردی توضیح میدهیم.
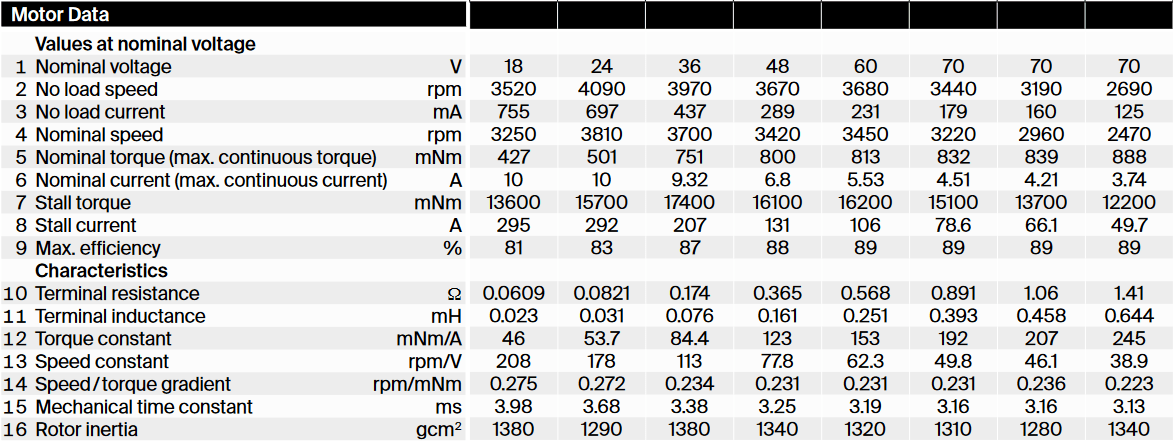
جدول ۱: مشخصات الکتریکی موتور دی سی
ولتاژ نامی (Nominal Voltage):
به ولتاژی اطلاق میشود که موتور برای کار در آن ولتاژ ساخته شده است. اعمال ولتاژی کمتر از این ولتاژ باعث کاهش سرعت و گشتاور نامی موتور خواهد شد و ضرری برای موتور نخواهد داشت. ولی اعمال ولتاژی بیشتر از ولتاژ نامی باعث کاهش طول عمر موتور شده و احتمال آسیب رساندن به موتور را افزایش میدهد.
سرعت بیباری (No load speed):
در صورتی که هیچگونه باری به شفت موتور متصل نباشد با اتصال موتور به ولتاژ نامی خود موتور شروع به شتاب گرفتن تا ماکزیمم سرعت خود مینماید به این سرعت سرعت بی باری میگویند.
جریان بی باری (No load current):
به جریان عبوری از موتور زمانیکه هیچگونه باری متصل به شفت موتور نباشد جریان بیباری میگویند.
سرعت نامی (Nominal speed):
سرعت نامی سرعتی است که موتور برای کار دائم در آن سرعت بهینه شده است. سرعت نامی همواره کمتر از سرعت بیباری موتور میباشد.
گشتاور نامی (Nominal torque):
به گشتاور موتور در سرعت نامی گشتاور نامی میگویند.
جریان نامی (Nominal Current):
به جریان موتور در گشتاور نامی جریان نامی میگویند. موتور در این جریان میتواند به صورت دائم و طولانی مدت کار کند.
گشتاور استال (Stall torque):
به ماکزیمم گشتاور قابل تولید توسط موتور اطلاق میشود. این گشتاور زمانی که شفت موتور به صورت خارجی قفل شود و یا گشتاور بار به حدی افزایش یابد که موتور متوقف گردد، تولید میگردد. همچنین در لحظه شروع به کار موتور چون هنوز روتور حرکت نکرده در کسری از ثانیه گشتاور موتور برابر با گشتاور استال میشود که به آن گشتاور راهاندازی یا Starting torque میگویند.
جریان استال (Stall current):
به جریان عبوری از موتور زمانی که موتور در حالت استال است جریان استال میگویند. همچنین در لحظه شروع به کار موتور چون روتور بی حرکت است برای کسری از ثانیه جریان موتور با جریان استال برابر میشود که به آن جریان هجومی یا Inrush current میگویند.
ماکزیمم بازده (Maximum efficiency):
در یک موتور دی سی تمامی توان الکتریکی ورودی به توان مکانیکی تبدیل نمیشود بلکه بخشی از توان در اثر اصطکاک و یا به صورت اهمی در مقاومت سیمپیچ روتور به صورت گرما تلفت میشود. به نسبت توان مکانیکی خروجی به توان الکتریکی ورودی برحسب درصد بازده میگویند.
مقاومت سیمپیچ روتور (Terminal resistance):
مقدار مقاومت اهمی که از دو سر ترمینالهای موتور دیده میشود. این مقاومت در واقع مقاومت اهمی سیم پیچ روتور میباشد.
اندوکتانس سیمپیچ روتور (Terminal inductance):
به مقدار سلف دیده شده از دو سری ترمینالهای موتور اندوکتانس موتور میگویند.
ضریب یا ثابت گشتاور (Torque constant):
این پارامتر تعیین میکند که با افزایش جریان موتور با چه نرخی گشتاور افزایش مییابد.
ضریب یا ثابت سرعت (Speed constant):
این پارامتر تعیین میکند که با افزایش ولتاژ BEMF سرعت موتور با چه نرخی افزایش مییابد.
ثابت زمانی مکانیکی (Mechanical time constant):
هر چقدر این پارامتر کمتر باشد نشان میدهد که واکنش موتور به تغییر ولتاژ ورودی سریعتر میباشد و در اثر یک تغییر ولتاژ موتور سریعتر به سرعت خواسته شده میرسد.
ممان اینرسی روتور (Rotor inertia):
اینرسی روتور را تعیین مینماید. هرچقدر مقدار این پارامتر کمتر باشه موتور سریعتر شتاب میگیرد.
هنگام انتخاب یک موتور دی سی مهم ترین مشخصات الکتریکی که باید مد نظر داشته باشید عبارتند از: ولتاژ نامی، گشتاور نامی و سرعت نامی. اگر قصد استفاده از یک موتور دی سی در یک ربات متحرک را دارید از آنجاییکه اکثر باتریهای موجود ۱۲ ولت هستن بهتر است از موتوری با ولتاژ نامی ۱۲ ولت استفاده کنید. گشتاور و سرعت نامی نیز باید متناسب با گشتاور و سرعت مورد نیاز به درستی انتخاب شوند.
۳- مشخصات «مکانیکی» در هنگام خواندن دیتاشیت موتور دیسی
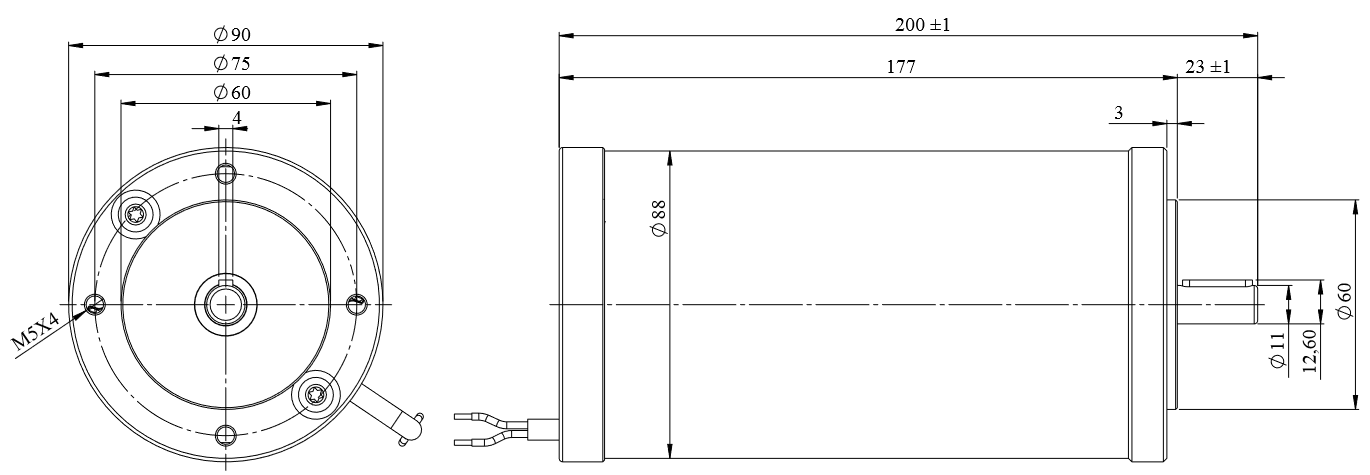
شکل ۲: ابعاد مکانیکی یک موتور دی سی کرماس ۲۵۰ وات ساخت ترکیه
مهمترین مشخصات مکانیکی که هنگام انتخاب یک موتور دی سی باید در نظر بگیرید (که در هنگام خواندن دیتاشیت باید به آن توجه کنید) عبارتند از:
- طول یا ارتفاع موتور: در مثال شکل ۲ طول موتور ۲۰۰ میلیمتر میباشد.
- قطر موتور: در مثل شکل ۲ قطر موتور ۹۰ میلیمتر میباشد.
- طول شفت موتور: در مثال شکل ۲ طول شفت موتور ۲۳ میلیمتر است.
- قطر شفت موتور: مطابق شکل ۲ موتور دارای شفتی به قطر ۱۱ میلیمتر است، همچنین ارتفاع خار موتور برابر است با ۱٫۶ میلیمتر (۱٫۶ = ۱۱ – ۱۲٫۶).
- سایز سوراخها و پیچ مورد نیاز برای نصب موتور: مطابق شکل ۲ موتور دارای ۴ عدد سوراخ متناسب با پیچ M5 میباشد (پیچ M5 یعنی پیچ با قطر ۵ میلیمتر).
- محل قرارگیری کابل تغذیه و انکودر: در صورتی که به محل قرارگیری کابل تغذیه و انکودر دقت نکنید ممکن است در عمل و به هنگام نصب موتور دچار مشکل شوید. در مثال شکل ۲ کابل تغذیه از انتهای موتور خارج شده است.
- وزن موتور: در کاربردهایی همانند رباتهای متحرک وزن موتور از اهمیت بالایی برخوردار بوده و باید در انتخاب موتوری با وزن مناسب دقت کافی را داشته باشید.
۴- «تحلیل منحنیهای مشخصات عملکردی موتور دی سی» هنگام خواندن دیتاشیت
در این قسمت میخواهیم منحنیهای مشخصات عملکردی یک موتور دی سی را بررسی و تحلیل کنیم. جدول مشخصات این موتور به صورت جدول ۲ میباشد.
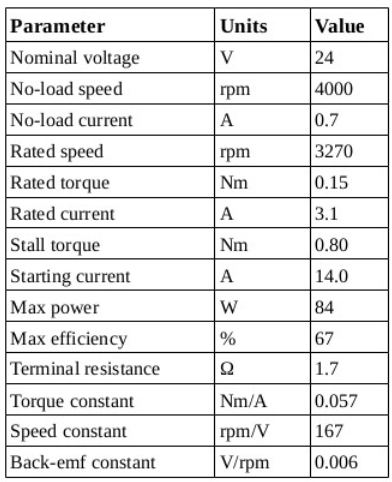
جدول ۲: مشخصات موتور دی سی مد نظر
شکل ۳ نمودارهای عملکردی یک موتور دی سی را نشان میدهد. این نمودار شامل چهار منحنی میباشد که در آن سرعت، جریان، توان و بازده برحسب گشتاور رسم شدهاند. برای بررسی بهتر، هر مشخصه را به صورت جداگانه ترسیم میکنیم.
شکل ۳: نمودار مشخصات عملکردی یک موتور دی سی
اولین و مهم ترین مشخصه، منحنی سرعت-گشتاور میباشد که در شکل ۴ ترسیم شده است. با توجه به منحنی سرعت-گشتاور میتوان گفت که در موتورهای دی سی رابطه سرعت و گشتاور به صورت خطی میباشد به طوریکه با افزایش گشتاور، سرعت به صورت خطی کاهش مییابد. محل برخورد منحنی با محور سرعت را سرعت بیباری یا No-Load Speed میگویند. به عبارتی زمانیکه هیچ گونه باری متصل به شفت موتور نباشد، موتور با ماکزیمم سرعت خود که سرعت بیباری نامیده میشود دوران میکند. همچنین محل برخورد منحنی با محور گشتاور را گشتاور استال یا Stall Torque مینامند. این حالت زمانی رخ میدهد که بار متصل به شفت موتور آنقدر زیاد شود تا جاییکه شفت موتور به طور کامل متوقف گردد.
شکل ۴: منحنی سرعت-گشتاور موتور دی سی مغناطیس دائم
برای رسم منحنی سرعت-گشتاور شکل ۴ به صورت عملی میتوانیم از تست ستاپ شکل ۵ استفاده کنیم. در این تست ستاپ یک جرم با وزنی مشخص را توسط یک نخ یا تسمه از پولی متصل به موتور دی سی که بر روی یک میز قرار گرفته است آویزان میکنیم. سپس با اتصال موتور به منبع تغذیه و اعمال ولتاژ ی برابر با ولتاژ نامی موتور، موتور شروع به حرکت خواهد کرد. با بالا آمدن جرم به تدریج نخ یا تسمه به دور پولی پیچیده میشود و فاصله لبه نخ یا تسمه از مرکز پولی افزایش مییابد. میدانیم که گشتاور برابر است با حاصلضرب جرم متصل به پولی در شعاع مرکز پولی از لبه نخ یا تسمه که در شکل ۵ مشخص شدهاند. بنابراین با ادامه حرکت موتور و افزایش شعاع r گشتاور متصل به شفت آن افزایش مییابد تا جاییکه گشتاور بار متصل به شفت موتور به اندازهای میرسد که با ماکزیمم گشتاور قابل تولید توسط موتور برابر شده و موتور متوقف میشود. اکنون با ضرب کردن مقدار جرم وزنه در شعاع مرکز پولی از لبه نخ یا تسمه میتوانیم گشتاور استال موتور را برحسب کیلوگرم سانتیمتر محاسبه کنیم. با تقسیم گشتاور محاسبه شده بر عدد ۱۰ گشتاور بر حسب نیوتون متر بدست خواهد آمد. مقدار گشتاور استال موتور را بر روی محور افقی یا Torque مشخص میکنیم!
سپس بار متصل به شفت موتور را کامل جدا کرده و اجازه میدهیم موتور بدون بار تا ماکزیمم سرعت خود شتاب بگیرد. این سرعت معادل سرعت بیباری موتور خواهد بود. سرعت بیباری را برحسب دور بر دقیقه بر روی محور عمودی یا Speed مشخص میکنیم! اکنون با وصل کردن این دو نقطه به وسیله یک خط به یکدیگر منحنی سرعت-گشتاور را ترسیم میکنیم.
شکل ۵: تست ستاپ لازم جهت بدست آوردن منحنی سرعت-گشتاور موتور دی سی
در شکل ۶ منحنی جریان-گشتاور رسم شده است. همانطورکه مشاهده میکنید رابطه جریان برحسب گشتاور نیز به صورت خطی میباشد. به طوریکه با افزایش گشتاور بار (گشتاوری که در نتیجه اتصال موتور به یک بار خارجی به شفت آن وارد میشود)، جریان مورد نیاز نیز افزایش مییابد. به جریان در زمانی که گشتاور صفر است جریان بیباری یا No-Load Current میگویند. همچنین به جریانی که در ماکزیمم گشتاور (Stall Torque) از موتور کشیده میشود جریان استال (Stall Current) یا جریان شروع به کار (Starting Current) گفته میشود. این جریان، جریان شروع به کار نیز نامیده شده است چون زمانیکه موتور میخواهد در اولین لحظات پس از اتصال تغذیه شروع به حرکت نماید از آنجاییکه سرعت موتور صفر است، موتور دارای ماکزیمم گشتاور خود میباشد و بیشترین جریان از آن کشیده میشود. به این جریان، جریان هجومی یا Inrush Current نیز میگویند چون به مدت بسیار کوتاه در حد چند میلیثانیه در همان لحظه شروع به کار موتور از موتور عبور میکند.
شکل ۶: منحنی جریان-گشتاور موتور دی سی مغناطیس دائم
وظیفه یک موتور الکتریکی تبدیل توان الکتریکی به توان مکانیکی میباشد. توان الکتریکی ورودی برابر است با حاصلضرب ولتاژ ترمینال موتور در جریان موتور که بخشی از این توان در اثر اصطکاک و به صورت گرما در موتور تلف شده و بخش عمده آن به توان مکانیکی تبدل میشود. توان مکانیکی موتور از حاصلضرب سرعت موتور در گشتاور موتور بدست میآید. شکل ۷ منحنی توان مکانیکی موتور دیسی را نشان میدهد. مطابق شکل ۷ میتوان دید که بیشترین توان مکانیکی در نصف گشتاور استال موتور رخ میدهد. به عنوان مثال در شکل ۴ گشتاور استال موتور ۰٫۸ نیوتون متر میباشد که مطابق شکل ۷ دقیقا بیشترین توان مکانیکی به ازای گشتاور ۰٫۴ نیوتون متر حاصل شده است.
شکل ۷: منحنی توان تولیدی موتور دی سی برحسب گشتاور
هر اندازه یک موتور دی سی به میزان بیشتری توان الکتریکی ورودی را به توان مکانیکی در خروجی تبدیل کند و مقدار کمتری از توان الکتریکی به صورت گرما در موتور تلف شود، بازده آن بیشتر خواهد بود. نمودار بازده موتور دی سی در شکل ۸ ترسیم شده است. مطابق شکل ۸ با افزایش گشتاور و افزایش جریان عبور از موتور، مقدار توان تلفاتی در موتور بیشتر شده و بازده کاهش مییابد.
شکل ۸: منحنی بازده موتور دی سی
۵- جمع بندی آموزش روش خواندن دیتاشیت
هنگام انتخاب یک موتور دیسی ابتدا با توجه به تغذیه موجود ولتاژ نامی موتور را انتخاب نمایید. سپس از روی توان مکانیکی مورد نیاز میتوانید توان نامی موتور را انتخاب کنید (توان نامی موتور از حاصلضرب گشتاور نامی در سرعت نامی حاصل میشود). بهتر است ۲۰ تا ۳۰ درصد توان نامی موتور بالاتر از توان مکانیکی مورد نیاز انتخاب شود تا در عمل با مشکل مواجه نشوید. با توجه به منحنیهای علمکردی موتور میتوانید محاسبه کنید که در سرعت مورد نیازتان آیا موتور دارای گشتاور کافی میباشد یا خیر و موتوری با گشتاور و سرعت نامی متناسب با کاربرد خود خریداری نمایید. جهت مشاوره تخصصی و انتخاب موتور و درایور مناسب با شرکت ربات سازان تماس حاصل فرمایید.
{kind=link}
{kind=link}
{kind=link}
1 Comment
[…] قرار گرفته است. برای اطلاع از مشخصات کاملتر باید به دیتاشیت الکترو موتور مراجعه فرمایید. در این مقاله با نحوه […]