
طرح دکتر کینکت
۵ مرداد ۱۳۹۷راههای اندازهگیری میزان چرخش در رباتیک (انکودر)
۵ مرداد ۱۳۹۷
مقدمه موتور دی سی (DC)
موتورهای الکتریکی وسایلی برای تبدیل انرژی الکتریکی به مکانیکی میباشند که این انرژی مکانیکی در رباتیک، سیستمهای اتوماسیون، سیستمهای CNC، پرینترهای سه بعدی، سیستمهای کنترل تردد، نوار نقاله، دربهای اتوماتیک و … مورد استفاده قرار میگیرد.
اولین موتور الکتریکی توسط شخصی بهنام William Sturgeon در سال ۱۸۳۲ اختراع شد. پس از آن در سال ۱۸۷۳ اولین موتور الکتریکی موفق در عرصه صنعت وارد بازار شد.
موتورهای الکتریکی را میتوان از جهات مختلفی دسته بندی و مقایسه کرد. در یکی از این دستهبندیها میتوان آنها را به دو دسته زیر تقسیم کرد:
۱- موتورهای جریان مستقیم (DC Motors)
۲- موتورهای جریان متناوب (AC Motors)
موتورهای جریان مستقیم
موتور دی سی (DC) را میتوان سادهترین نوع موتورهای الکتریکی دانست که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکنند. نحوهی عملکرد تمامی موتورهای الکتریکی از قوانین یکسانی پیروی میکنند. در این مقاله نحوه عملکرد موتور DC را بررسی میکنیم. شکل ۱ را در نظر بگیرید:
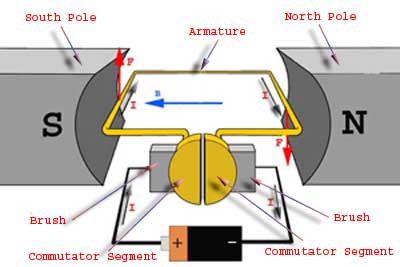
شکل ۱: ساختار کلی یک موتور دی سی (DC)
همانطور که در شکل ۱ مشاهده میکنید یک موتور DC از یک آرمیچر (سیم هادی حامل جریان) حامل جریان که از طریق کموتاتور و از طریق جاروبک به منبع توان DC وصل شده، تشکیل شده است. آرمیچر یا سیم حامل جریان در داخل قطب شمال جنوب یک آهنربای دائم قرار گرفته است.
طبق رابطه (۱-۱) که به قانون نیروی لورنتز معروف است به بار الکتریکی که در مجاورت میدان الکتریکی یا مغناطیسی قرار بگیرد نیرویی طبق رابطه زیر وارد میشود.
![]()
در رابطه فوق:
F نیروی لورنتز بر حسب نیوتون
E میدان الکتریکی بر حسب ولت بر متر
B میدان مغناطیسی بر حسب تسلا
q مقدار بار الکتریکی بر حسب کولمب
v سرعت لحظهای ذره بر حسب متر بر ثانیه
*علامت ضرب خارجی در بردارها
از آنجایی که جریان ناشی از حرکت الکترونهای آزاد درون هادی میباشد و الکترونهای آزاد بارهایی الکتریکی با بار منفی میباشند، بنابراین بایستی بر این بارهای الکتریکی که در درون هادیهای آرمیچر جریان دارند، از طرف میدان مغناطیسی ناشی از آهنربای دائم نیرویی وارد شود. شکل ۲ را در نظر بگیرید:
شکل ۲: محاسبهی نیروی لورنتز
اگر در قطعه ای به طول dL از سیم حامل جریان بار dq با سرعت v جریان داشته باشد طبق رابطه (۲-۱) مقدار نیروی لورنتز عبارت است از:
![]()
از آنجایی که آرمیچر تنها در مجاورت میدان مغناطیسی قرار دارد بنابراین در رابطه (۲-۱) شدت میدان الکتریکی صفر خواهد بود. بنابراین داریم:
![]()
![]()
با انتگرال گیری از رابطه (۴-۱) روی کل طول مسیر حامل جریان داریم:
![]()
در رابطه فوق θ زاویه بین میدان مغناطیسی و جهت جریان میباشد.
اکنون در شکل ۱ قسمت سمت چپ آرمیچر یا همان سیم حامل جریان را در نظر میگیریم. از آنجایی که در این وضعیت زاویه بین میدان مغناطیسی و جریان عبوری ۹۰ درجه میباشد بنابراین نیروی وارده به این قسمت از آرمیچر برابر است با:
![]()
چون زاویه بین جهت جریان و جهت میدان مغناطیسی یعنی θ برای قسمت های سمت راست و چپ آرمیچر همواره برابر ۹۰ درجه میباشد، بنابراین میزان این نیرو در حین چرخش همواره ثابت است.
به منظور تعیین جهت نیروی وارده بر هر یک از قسمت های حامل جریان الکتریکی در آرمیچر از قانون دست چپ فلمینگ استفاده میکنیم. شکل ۳ را در نظر بگیرید.
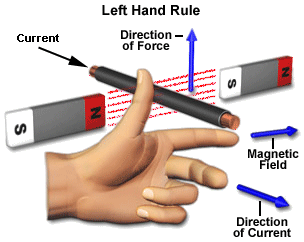
شکل ۳: قانون دست چپ فلمینگ
قانون دست چپ فلمینگ بیان میکند که چنانچه انگشتان اشاره، میانی و شست دست چپ را مطابق شکل ۳ به گونه ای تنظیم کنیم که انگشت اشاره در جهت میدان مغناطیسی (جهت میدان مغناطیسی از قطب شمال به جنوب یعنی از N به S می باشد) و انگشت میانی در جهت جریان عبوری از سیم حامل جریان قرار گیرند، آنگاه انگشت شست جهت نیروی وارده به سیم حامل جریان را نشان خواهد داد.
بنابراین طبق قانون دست چپ فلمینگ جهت نیروی وارده به قسمت سمت چپ آرمیچر به سمت بالا (همان طور که در شکل ۳ نیز مشخص شده است) خواهد بود.
با تکرار محاسبات میزان نیروی وارده به قسمت سمت راست آرمیچر هم اندازه نیروی وارده به قسمت سمت چپ ولی به سمت پایین میباشد. همچنین از آنجایی که زاویه بین میدان مغناطیسی و جهت جریان عبوری در سایر قسمتهای آرمیچر در وضعیت نشان داده شده در شکل ۱ صفر میباشد، بنابراین نیروی وارده به این قسمتها در وضعیت قرار گرفته در شکل ۱ صفر خواهد بود (خارج از وضعیت شکل ۱ از آنجایی که نیروهای وارده به قسمتهای جلویی و عقبی آرمیچر هم اندازه و خلاف جهت هم بوده و در راستای محور دوران میباشند نمیتوانند گشتاور موثری که منجر به چرخش شود در آرمیچر ایجاد کنند (که در ادامه بحث خواهد شد).
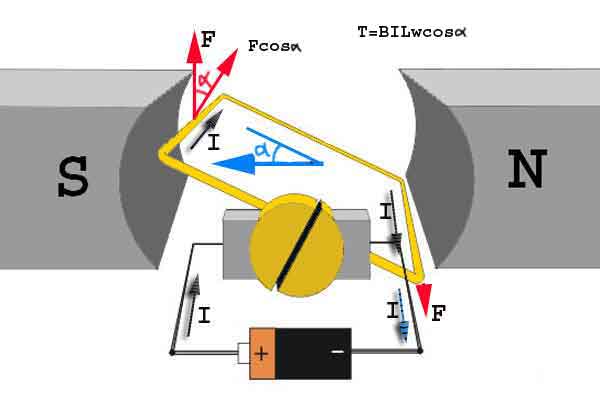
از آنجایی که میزان نیروهای وارده به قسمتهای سمت چپ و سمت راست آرمیچر هم اندازه ولی خلاف جهت هم و مماس بر محور دوران میباشند بنابراین برآیند این نیروها باعث ایجاد گشتاور حول محور دوران آرمیچر شده و باعث چرخش آرمیچر در جهت ساعتگرد میشود. شکل ۴ را درنظر بگیرید.
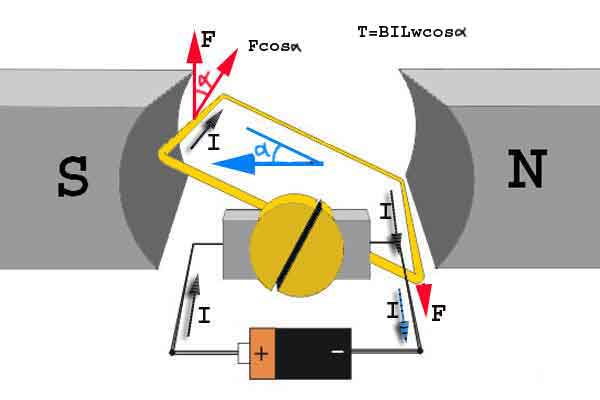
شکل ۴: وضعیت آرمیچر اندکی پس از چرخش
شکل ۴ وضعیت آرمیچر را اندکی پس از چرخش در جهت ساعت گرد نشان میدهد. اکنون به بررسی دقیقتر گشتاور ایجاد شده در آرمیچر میپردازیم. میزان این گشتاور تولید شده از رابطه زیر قابل محاسبه است.
![]()
به عبارتی گشتاور برابر است با حاصل ضرب میزان نیروی مماس بر جهت چرخش آرمیچر بر حسب نیوتون در فاصله از محور دوران بر حسب متر. مطابق شکل ۴ زاویه بین صفحه چرخش آرمیچر و صفحه مرجع یا همان موقعیت اولیه آرمیچر که در اینجا در طول جهت میدان مغناطیسی قرار گرفته است را α می نامیم، بنابراین داریم:
![]()
با جایگذاری رابطه (۶-۱) در رابطه بالا داریم:
![]()
چون همواره زاویه بین جهت جریان و جهت میدان مغناطیسی یعنی θ برای قسمتهای سمت راست و چپ آرمیچر ۹۰ درجه میباشد بنابراین داریم:
![]()
عبارت cosa در رابطه فوق به وضوح نشان میدهد که برخلاف نیرو، گشتاور در موقعیت های مختلف متفاوت بوده و با تغییر α تغییر خواهد کرد. برای درک بهتر اصول کار موتور DC مقدار گشتاور را در سه وضعیت محسابه میکنیم.
وضعیت ۱: ابتدا میزان گشتاور را در لحظه شروع یا موقعیت مرجع (شکل ۵) که در آن است محسابه میکنیم.
![]()
میزان گشتاور در این وضعیت بیشترین گشتاور ممکن بوده و پس از این وضعیت گشتاور شروع به کاهش می کند.
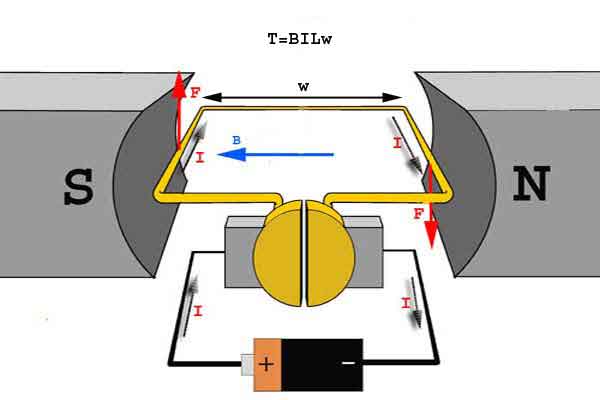
شکل ۵: آرمیچر در وضعیت مرجع
وضعیت ۲: پس از اینکه آرمیچر شروع به چرخش میکند زاویه بین صفحه چرخش آرمیچر و صفحه مرجع بیشتر شده و میزان کسینوس آن کمتر میشود و به عبارتی گشتاور کاهش مییابد. مقدار گشتاور در این وضعیت از رابطه (۹-۱) بدست میآید.
شکل ۶: آرمیچر در وضعیت۲
وضعیت ۳: این حالت زمانی است که صفحه چرخش عمود بر صفحه مرجع قرار میگیرد و میزان گشتاور به کمترین مقدار خود یعنی صفر کاهش مییابد.
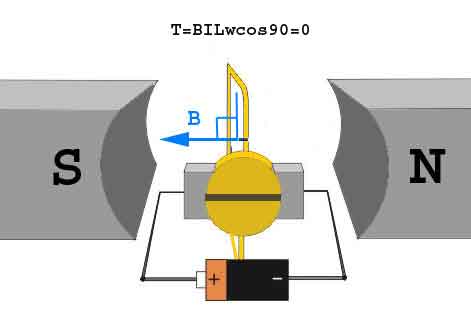
شکل ۷: آرمیچر در وضعیت۳
به بیانی دیگر در این وضعیت برآیند نیروهای وارده بر آرمیچر نمیتواند گشتاور چرخشی در آن ایجاد کند. به عبارتی باید نیرویی مماس بر جهت چرخش موجود باشد تا منجر به گشتاور شود حال اینکه در این وضعیت مؤلفه نیروی مماس بر جهت چرخش صفر می شود.
اکنون ممکن است این سؤال پیش آید که چطور یک موتور DC میتواند حرکتی مدام و پیوسته داشته باشد. پاسخ به این سؤال این است که موتور به گونهای ساخته شده است که ممان اینرسی آن در این نقطه توانایی غلبه و عبور از این حالت را دارد.
اگر جواب قانع کننده نیست میتوان مسئله را به گونهای دیگر تحلیل کرد. در عمل آرمیچر موتور از صدها دور سیم هادی درست شده است و به منظور تقویت میدان آن و در نتیجه افزایش قدرتش از یک هسته با ضریب مغناطیس شوندگی بالا که این سیمهای هادی به دور آن پیچیده شدهاند استفاده میشود.
حال تصور کنید که آرمیچری با چنین ساختاری از وضعیت ۱ با ماکزیمم گشتاور شلیک میشود و تا رسیدن به وضعیت ۳ آنقدر سرعت و توان دارد که بتواند این وضعیت را حتی اندکی پشتسر بگذارد. با عبور از این وضعیت جهت جریان در آرمیچر به کمک جاروبک ها و کموتاتور برعکس شده و در نتیجه جهت نیروهای وارده به آن نیز برعکس میشود (توجه شود چنانچه جهت جریان در آرمیچر عوض نشود پس از عبور از وضعیت ۳ دوباره آرمیچر به همین وضعیت باز خواهد گشت).
با عوض شدن جهت نیروهای وارده به آرمیچر پس از عبور از وضعیت ۳ چرخش در همان جهت ادامه مییابد و گشتاور افزایش مییابد. این روند تکرار شده و باعث حرکت پیوسته موتور میشود.
انواع موتورهای DC
۱- موتورهای DC خود تحریک
۲- موتورهای DC با تحریک مجزا
۳- موتورهای DC مغناطیس دائم
مزایا و معایب موتورهای DC
الف) مزایای موتورهای دیسی
۱- گشتاور بالا. موتورهای DC دارای گشتاور بالایی میباشند. به خصوص گشتاور راه اندازی بالای این موتورها کاربردهای فراوانی دارد که میتوان به استفاده از آنها در جرثقیلهای برقی و قطارهای درون شهری اشاره کرد. هم چنین در موتورهای DC میتوان به راحتی با محدود کردن جریان، گشتاور را تنظیم و کنترل کرد.
۲- راحتی کنترل سرعت. کنترل سرعت در موتورهای DC بسیار ساده تر از نوع AC است زیرا در این گونه موتورها سرعت با ولتاژ اعمالی به آرمیچر رابطه مستقیم داشته و بنابراین با تنظیم ولتاژ آرمیچر میتوان سرعت را تنظیم کرد.
۳- هزینه پایین درایورهای سرعت. سرعت موتورهای AC را میتوان توسط درایورهای تنظیم فرکانس به طور دقیق کنترل کرد اما قیمت این درایورها به شدت به کیفیت تغذیه در آنها وابسته است. به عنوان مثال قطعات سوئیچینگ حالت جامد در این درایورها طیف وسیعی از هارمونیک تولید میکنند که کنترل سرعت را تحت تاثیر قرار میدهند و این درحالتی است که کنترل سرعت در موتورهای DC تاثیر زیادی از کیفیت تغذیه نمیپذیرد.
ب) معایب موتورهای دی سی
۱- هزینه های جانبی بالا. هزینههایی از قبیل نیازمند بودن به منبع تغذیه DC و تعمیرات به دلیل جاروبکدار بودن این دسته از موتورها.
۲- یکسوسازی. برای تغذیه هر موتور DC از شبکه باید یکسوسازی انجام شود که این امر میتواند کیفیت تغذیه موتور DC را کاهش دهد.
۳- هزینه اولیهی بالا. ساختار موتورهای DC به دلیل وجود کموتاتور، جاروبک و سیمپیچی آرمیچر نسبت به موتورهای AC به طور قابل ملاحظه ای پیچیدهتر و گرانتر میباشد. یک موتور القایی به کموتاتور و جاروبک نیاز نداشته و روتور دارای ساختار قفس سنجابی بوده که نسبت به روتور سیم پیچی شده در موتورهای DC پیچیدگی کمتری دارد.
۴- نویز. به دلیل وجود جاروبک در موتورهای DC که وظیفه انتقال توان به آرمیچر از طریق کموتاتور را بر عهده دارند جرقههایی تولید میشوند که علاوه بر کوتاه کردن طول عمر جاروبک و کموتاتور باعث تولید نویزهای فرکانس بالایی شده که میتوانند بر ادوات جانبی تاثیر بگذارند.
{kind=link}
{kind=link}
{kind=link}
4 Comments
با عرض سلام و خسته نباشید خدمت مهندسین عزیز مطالب فوق العاده خواندنی و زیباست هرچند بنده سررشته ای از مهندسی و کار با ربات رو ندارم اما بسیار جذب مطالب شما شدم امیدواریم تلاش و کار شما با اعداد و ارقام و تفکر شما بر روی دستگاههای متنوع باعث رونق رباتیک ایران در سطح جهانی شود و هر روز شاهد هنرنمایی های شما در عرصه رباتیک باشیم
مهدی حسن پور دهنوی
سلام عرض ادب خسته نباشید.من سر رشته ای درمورد الکترونیک ندارم فقط یه سوال پیش پا افتاده دارم.من یک اداپتور ۱۲ ولت ۳ امپر دارم میخوام وصل کنم به یه موتور دی سی کوچک وقتی وصل میکنم تیک دار حرکت میکنه با سرعت خیلی کم. بعضی مواقع هم که آداپتور رو وصل میکنم سرعت میره بالا بعد یک ثانیه میاد پایین ..مشکل چیه؟ ممنون میشم راهنمایی کنین.
سلام
از آداپتور مطمئن هستین که سالمه؟ با یک آداپتور دیگه یا با باتری تست بگیرین. احتمال هم داره موتور قدیمیه و جاروبک هاش آسیب دیده باشن که بهتره با یک موتور دیگه هم تست کنین.
سلام من به موتور الکتریکی ac یا dcنیاز دارم که یک متر و در ۱.۶ثانیه حرکت کنه ،چطوری یا از کجا میشه چنین موتور الکتریکی تهیه کنم