
الگوریتم کنترل PID
۲۴ تیر ۱۳۹۷واقعیت افزوده و کنترل ربات
۲۴ تیر ۱۳۹۷
استفاده از هدایت موتور پلهای (استپر) در رباتیک
چکیده – استفاده از موتورهای پلهای در روباتیک از اهمیت اساسی برخوردار است. برنامههای کاربردی روباتیک نیاز به حرکات دقیق دارند. این مقاله سیستم درایور* موثر و چند بعدی موتور پلهای برای استفاده آن در روباتیک ارائه داده است. درایور پیشنهادی کنترل دقیق حرکت را با کوچکترین زاویه گام ممکن ارائه میدهد. یک مدل از موتور پلهای آهنربایی در نرمافزار شبیهساز MATLAB Simulink شبیهسازی شده است.
نرمافزار و مدار سختافزاری درایور انواع موتور پلهای برای حرکات مختلف موتور پلهای طراحی و تست شده است. مدار پیشنهاد شده از طراحی مدار تغذیه، میکروکنترلر، بافر و مدار هدایتی تشکیل شده است. برخلاف یک کنترل دستی، میکرو کنترلر AT89c51 برنامهریزی شده است که کاربرپسند میباشد و کاربر میتواند به آسانی حرکت مطلوب موتور پلهای خود را انتخاب کند. درایور پیشنهادی اجازه میدهد موتور پلهای حرکت خود را با انتخاب گزینههای نیمه یا کامل یک گام، حرکت به جلو یا عقب و کنترل سرعت RPM یا مشخص کردن تعداد گامها که باید حرکت کند کنترل شود.
* درایور: میکروکنترلر، برنامههای کاربردی روباتیک، کنترل کننده سرعت، موتور پلهای.
۱- مقدمه
موتور پلهای یک سیستم الکتروموتور دیجیتال است که در آن هر یک از پالسهای الکتریکی ورودی روتور را با زاویه جدا از هم بهنام زاویه گام حرکت میدهد و بنابراین اسم آن موتور پلهای است. موتور پلهای عموما با کابردهای بیشماری در صنعت استفاده میشود. روباتیک یکی از آن کاربردهایی است که استفاده ازموتور پلهای اهمیت بسیاری دارد. برنامههای روباتیک نیازمند حرکت با دقت بالایی را دارند. موتورهای پلهای برای برنامههای روباتیک مناسب هستند زیرا حرکت گسسته گامها را شامل میشوند. این نوع موتور در یک زاویه گسسته بهنام زاویه گام حرکت میکند. موتور پلهای در تجارت و صنعت استفاده میشود زیرا بسیار قابل اطمینان، هزینه کم، گشتاور زیاد در سرعت کم و سادگی ساخت و راه اندازی در همه محیطها است. اما برای راهاندازی یک موتور استپر، نیازمند درایور میباشیم. درایور اجازه میدهد تا کنترل دقیق حرکت یک موتور پلهای را به راحتی تنظیم کرد بطوریکه میتوان از آن در برنامههای روباتیک استفاده کرد.
بسیاری از طراحان بر روی مدار درایورهای موتور استپر کار کرده اند. اما طرح مدارات پیشنهاد شده هیچکدام رویکرد کاربردی مناسبی نداشتند. در این مقاله سیستم کارآمد برای موتورهای پلهای با استفاده از میکروکنترلر at89c51 برای کنترل هدایت یک موتور پلهای با روش کارامد ارائه میشود. بنابراین امکان انتخاب جلو یا عقب حرکت کردن، نیم یا کامل گام، و کنترل سرعت حرکت گام را برای کاربر فراهم میسازد.
۲- شبیهسازی موتور پلهای
برخلاف یک درایور دستی، سیستم درایور پیشنهاد شده امکان دقیق کنترل سرعت و حرکت موتور پلهای را فراهم میسازد و به کاربر اجازه میدهد تا حرکت خود را بصورت گزینههای نیمه یا کامل یک گام، حرکت به جلو یا عقب و کنترل سرعت RPM یا مشخص کردن تعداد گامهایی که باید حرکت کند انتخاب کرد. این مقاله شامل دو بخش است. بخش اول شبیهسازی موتور پلهای با استفاده از نرمافزار مهندسی شبیهسازی MATLAB Simulink است و بخش دوم طراحی سختافزار مدار توسعهیافته را توصیف میکند.
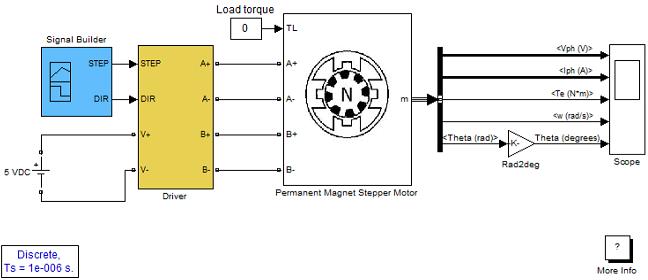
شکل ۱: مدل هدایت مغناطیسی موتور پلهای دو فاز
درایور موتور پلهای با استفاده از شبیهساز MATLAB Simulink’s SimPowerSystems شبیهسازی شده است. موتور پلهای شامل یک بلوک مغناطیسی موتور پلهای، یک بلوک هدایت کننده، یک بلوک سازنده سیگنال، یک ولتاژ DC و یک نمایشگر میباشد. از LCT meter برای پیدا کردن مقدار مقاومت و القاگری فاز سیمپیچ موتور پلهای بترتیب ۱۸ اهم و ۱۵ میلی هانری استفاده میشود.
شکل ۲: مدار مقاومت و القاگر سیمپیچ موتور القایی.
V=LW.+Rw.I
در اینجا، V ولتاژ فاز با ولت است، Lw نشان دهنده القاگری فاز بر اساس هانری است، I نشان دهنده جریان دنبال کننده سراسری سیمپیچ بر اساس آمپر است و Rw نشاندهنده مقاومت فاز برحسب اهم است. نتایج شبیه سازی در شکل ۵ آمده است.
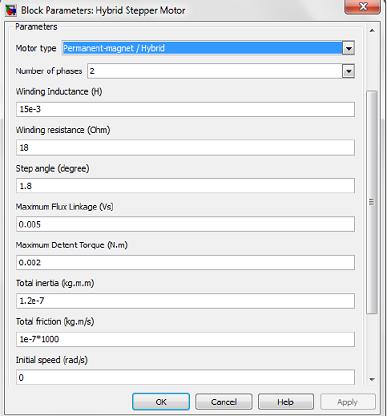
شکل ۳: مقادیر کادرها برای مقدار موتور پلهای مغناطیسی
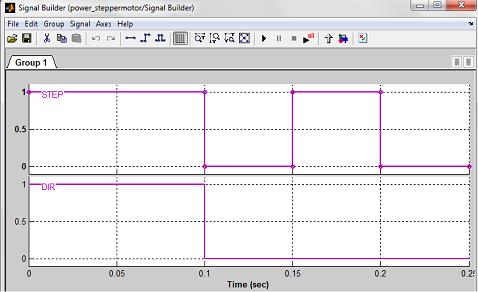
شکل ۴: نشان دادن جهت و گام سیگنال ساخته شده
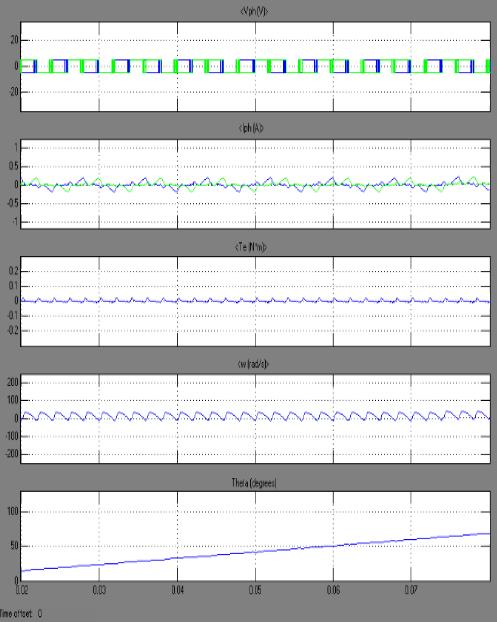
شکل ۵: شکل موج بدست آمده موتور پلهای مغناطیسی در شبیه ساز
۳- جزئیات مدار سخت افزاری
در این بخش سخت افزار مدار تغذیه و هدایت کننده طراحی و بررسی شده است.
الف) مدار تغذیه
مدار تغذیه در شکل ۶ نمایش داده شده است. مدار تغذیه از ترانسفرمر کاهنده و رگولاتور ولتاژ 7805 تشکیل شده است. میکروکنترلر و دیگر قطعات در مدار تغذیه +5V DC نیاز دارد.ترانسفورمر 230V/8V برای طرح مدار تغذیه انتخاب شده است. میکرو کنترلر +5V نیاز دارد. آیسی رگولاتور 7805 بعد از پل دیود یکسوکننده ولتاژ را تنظیم میکند. ولتاژ ورودی در رگولاتور 7805 باید تقریبا ۲ ولت بزرگتر از ولتاز خروجی باشد. از این رو ولتاژ ثانویه ترانسفورمر 8V طراحی شده است. خازنها برای هموار کردن نوسانات ولتاژ خروجی استفاده شده است.
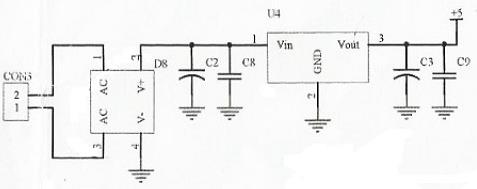
شکل۶: مدار تغذیه
ب) مدار راهانداز
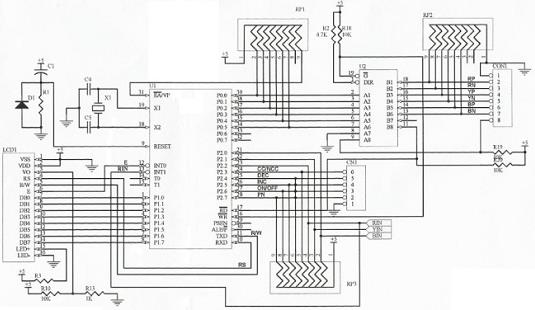
مدار راهانداز شامل LCD، میکروکنترلر، یک آیسی بافر و یک آیسی درایور میباشد. میکروکنترلر برنامهریزی شده و LCD در شکل ۷ نمایش داده شده است. این LCD بایستی وضعیت درایور درحالت RPM یا گام، سرعت یا تعداد گامها، جهت و وضعیت نیم یا کامل گام را نمایش دهد.
شکل ۷: نمایش موارد انتخاب شده در LCD

شکل ۸: سیستم درایور ساخته شده
شکل ۸ مدار کامل سیستم درایور یا راهانداز استپر ساخته شده را نشان میدهد. پارامترهای (حالت، سرعت، تعداد گامها، جهت، نیمگام یا گامکامل) را با استفاده از چهار کلید با نامهای “SET” , “IN(INCREMENT)” و “RUN/STOP” بهآسانی میتوان تعیین کرد. فقط چهار کلید برای کنترل حرکت موتور پلهای نیاز است. فشار دادن کلید “SET” به کاربر اجازه میدهد تا موارد را تغییر دهد. کلید “INC” اجازه میدهد پارامتر افزایش یابد، درحالی که کلید “DEC” اجازه میدهد پارامتر مدنظر کاهش یابد. کلید “RUN/STOP” موتور پلهای را حرکت میدهد یا اگر درحال حرکت باشد آن را متوقف میکند. کاربر حالت حرکت دلخواه خود را در برنامه موتور پلهای میتواند انتخاب کند. این ویژگیها در دیگر مقالات نوشته شده که مدارات هدایتی پیشنهاد دادهاند موجود نیست. برد مدار چاپ شده که شامل میکروکنترلر، بافر و LCD میشود در شکل ۹ نمایش داده شده است.
شکل ۹: طرح PCB دستگاه با میکرو کنترلر، بافر و LCD
خروجی میکروکنترلر، ورودی بافر را تغذیه میکند. یرای این کار از بافر HD74LS245P استفاده شده است. (شکل ۱۰)
شکل ۱۰: نموادر کلی آیسی بافر
بسته به سطح منطق در ورودی کنترل جهت (DIR)، بافر اجازه انتقال داده از گذرگاه B به گذرگاه A یا بلعکس را میدهد. ورودی فعال (G) برای غیرفعال کردن بافر میتوان استفاده کرد، بطوریکه گذرگاهها به طور موثری جدا شدهاند.
ترتیب پایههای آیسی بافر در شکل ۱۱ نمایش داده شده است.
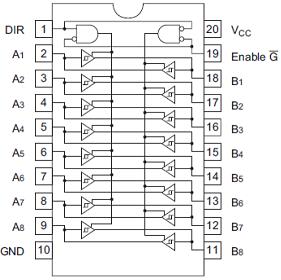
شکل ۱۱: پیکربندی پینهای آیسی بافر
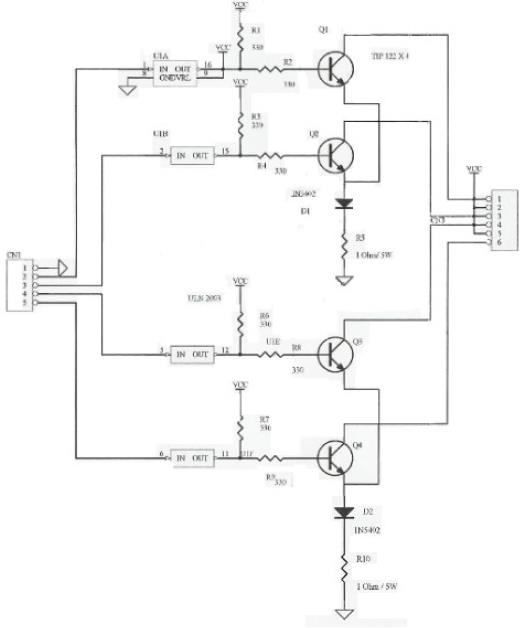
خروجی بافر در ورودی آیسی هدایت کننده استفاده میشود. برای آیسی هدایت کننده از ULN2003AN استفاده شده است. این یک ترانزیستور دارلینگتون منظم با ولتاژ و جریان بالا است. این آیسی شامل ۷ جفت دارلینگتون NPN است که دارای خروجی ولتاز بالا است. با دیود کاتد مشترک برای تعویض بارهای القایی. این آیسی دارای یک مقاومت سری ۲.۷ کیلو اهمی برای هرکدام از جفت دارلینگتونها است که برای بهره برداری مستقیم دستگاهها با TTL یا 5V Cmos است.
شکل ۱۲: نمای شماتیک برای هر یک از جفت دارلینگتونها
جفت دارلینگتون مورد استفاده سیگنالهای ضعیف را تقویت میکنند تا بتوان آن را در دیگر مدارات بطور واضح پیدا کرد. جفت دارلینگتون کمک میکند تا بهرهبرداری جریان با سطح بالا بدست آید، بنابراین سیگنال شفاف است. پیکربندی پایههای آیسی هدایتکننده در شکل ۱۳ نمایش داده شده است.
شکل ۱۳: پیکربندی پایههای آیسی هدایت کننده
آیسی هدایت کننده توانایی ۷ خروجی را دارد، که با استفاده از ۴ عدد از آنها موتور پلهای ۴ فاز را میتوان هدایت کرد. پینهای 1، 2، 5 و 6 استفاده شده است و پینهای 12، 15، 16 و 11 بهترتیب خروجی میدهند. پینهای 3، 4 و 7 استفاده نشده است.
شکل ۱۴: طرح PCB شامل آیسی هدایت کننده و موتور پلهای است
۳- نتایج
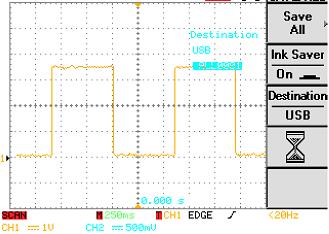
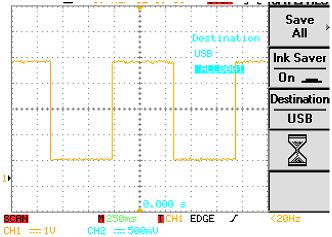
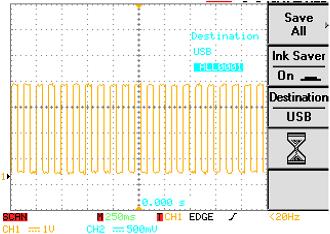
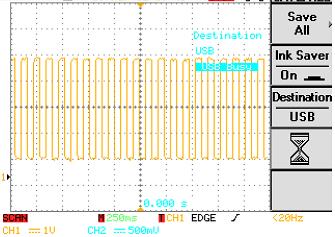
در این مقاله درایور موتور استپر طراحی شده است. نتایج طرح سختافزاری در پایین نمایش داده شده. شکل های ۱۵ تا ۲۰ نتایج ورودی و خروجی آیسی بافر در حالتهای مخلتف حرکات را نشان میدهد. پینهای 2، 3، 4 و 5 استفاده شده و پینهای 18، 17، 16 و 15 بترتیب خروجی هستند. پینهای 6، 7، 8 و 9 استفاده نشده است. شکل موجهای ورودی و خروجی تمامی پینها با استفاده از اسیلوسکوپ فراهم شده است.
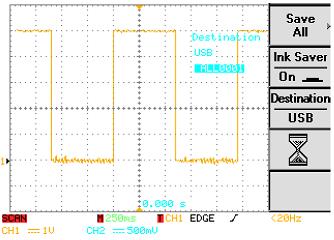
شکل ۱۵: ورودی پایههای بافر در 1RPM گام کامل در جهت جلو
شکل ۱۶: خروجی پایههای بافر در 1RPM گام کامل در جهت جلو
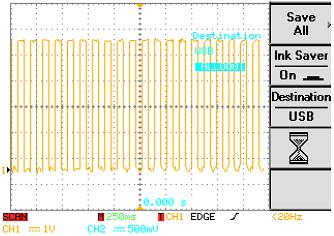
شکل ۱۷: ورودی پایههای بافر در 1RPM گام کامل در جهت جلو
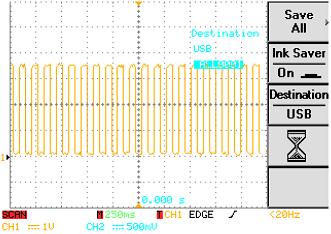
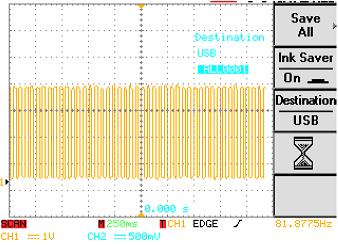
شکل ۱۸: خروجی پایههای بافر در 10RPM گام کامل در جهت جلو
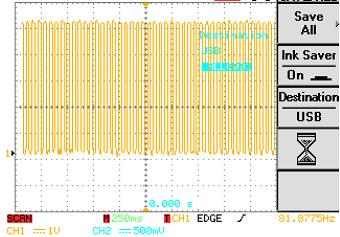
شکل ۱۹: ورودی پایههای بافر در 100RPM گام کامل در جهت جلو
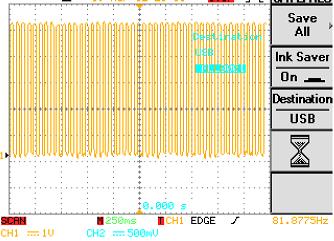
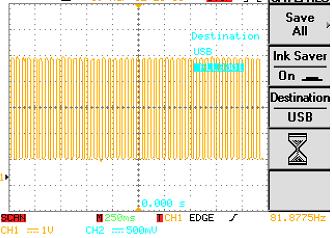
شکل ۲۰: خروجی پایههای بافر در 100RPM گام کامل در جهت جلو
شکلهای ۲۱ تا ۲۶ نتایج ورودی و خروجی آیسی درایور را نمایش میدهند.
شکل ۲۱: ورودی پایههای هدایتکننده در 1RPM گام کامل در جهت جلو
شکل ۲۲: خروجی پایههای هدایتکننده در 1RPM گام کامل در جهت جلو
شکل ۲۳: ورودی پایههای هدایتکننده در 10RPM گام کامل در جهت جلو
شکل ۲۴: خروجی پایههای هدایتکننده در 10RPM گام کامل در جهت جلو
شکل ۲۵: ورودی پایههای هدایتکننده در 100RPM گام کامل در جهت جلو
شکل ۲۶: خروجی پایههای هدایتکننده در 100RPM گام کامل در جهت جلو
{kind=link}
{kind=link}
{kind=link}