
درایور MDC20 | مناسب برای کنترل حلقه بسته
۱ خرداد ۱۳۹۸عملیات از راه دور در نرم افزار متلب توسط درایور MDC20 به کمک کنترلر PID
۱ خرداد ۱۳۹۸
رابط گرافیکی درایور MDC20
مراحل نصب رابط گرافیکی درایور MDC20 بسیار ساده بوده و نیازی به توضیح اضافی نمیباشد.
بعد از نصب، برنامه به شرح زیر می باشد:
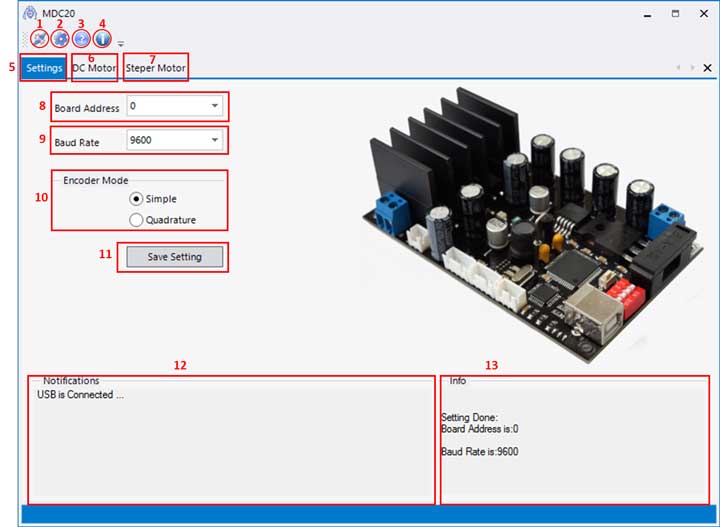
تنظیمات درایور MDC20
۱ – با کلیک بر روی این آیکون در صورت متصل بودن کابل و تغذیه ارتباط نرمافزاری برقرار خواهد شد و برای قطع ارتباط میتوانید مجددا بر روی همین آیکون کلیک نمایید.
۲ – از این قسمت میتوانید سرعت و پورت ارتباطی نرم افزار را مشخص نمایید.
۳ – در این قسمت شما قادر به مشاهده دفترچه راهنمای درایور خواهید بود.
۴ – این آیکون اطلاعات مفیدی راجعبه نرم افزار و شرکت سازنده آن در اختیار شما قرار خواهد داد.
۵ – این تب درصورتی کاربرد دارد که دیپ سوئیچها را در مد تنظیمات تنظیم کرده باشید و قصد تغییر تنظیمات را داشته باشید.
۶ – این تب درصورتی کاربرد دارد که دیپ سوئیچها را در مد راه اندازی موتور DC تنظیم کرده باشید.
۷ – این تب درصورتی کاربرد دارد که دیپ سوئیچها را در مد راه اندازی موتور Stepper تنظیم کرده باشید.
۸ – با استفاده از این گزینه آدرس درایور را تعیین میکنید.
۹ – با استفاده از این گزینه میتوانید سرعت انتقال داده را برای درایور تعیین کنید.
۱۰ – در این قسمت شما میتوانید مد عملیاتی انکودرها را تعیین کنید (جهت درک بهتر مدهای انکودر به دفترچه راهنمای درایور مراجعه نمایید).
۱۱ – با کلیک بر روی این دکمه میتوانید تغییرات ایجاد شده در تنظیمات درایور را اعمال نمایید.
۱۲ – رویدادها و خطاهای نرم افزار و درایور را نمایش میدهد.
۱۳ – اطلاعات و مشخصات درایور را نشان میدهد.

مد راه اندازی موتور DC درایور MDC20
۱۴ – موتور یک را فعال و غیر فعال میکند.
۱۵ – آدرس بوردی که قرار است با آن کار کنید.
۱۶ – موتور دو را فعال و غیر فعال میکند.
۱۷ – سرعت موتور یک را نمایش میدهد.
۱۸ – میتوانید با استفاده از این گزینه سرعت موتور یک را کنترل کنید. در صورت صفر بودن سرعت CW و CCW بدون رنگ پس زمینه خواهد بود. در صورت ساعت گرد بودن موتور CW با پس زمینه سبز خواهد بود و در صورت چرخش پادساعتگرد CCW با پس زمینه قرمز خواهد بود.
۱۹ – میتوانید با استفاده از این گزینه سرعت موتور دو را کنترل کنید. در صورت صفر بودن سرعت CW و CCW بدون رنگ پس زمینه خواهد بود. در صورت ساعت گرد بودن موتور CW با پس زمینه سبز خواهد بود و در صورت چرخش پادساعتگرد CCW با پس زمینه قرمز خواهد بود.
۲۰ – سرعت موتور دو را نمایش میدهد.
۲۱ – شتاب موتورها را نمایش میدهد.
۲۲ – مقدار انکودر یک را نمایش میدهد.
۲۳ – با استفاده از این گزینه میتوانید شتاب موتورها را تنظیم نمایید.
۲۴ – مقدار انکودر یک را نمایش میدهد.
۲۵ – در صورت فعال بودن مقدار انکودر یک را نمایش خواهد داد.
۲۶ – در صورت فعال بودن مقدار انکودر دو را نمایش خواهد داد.
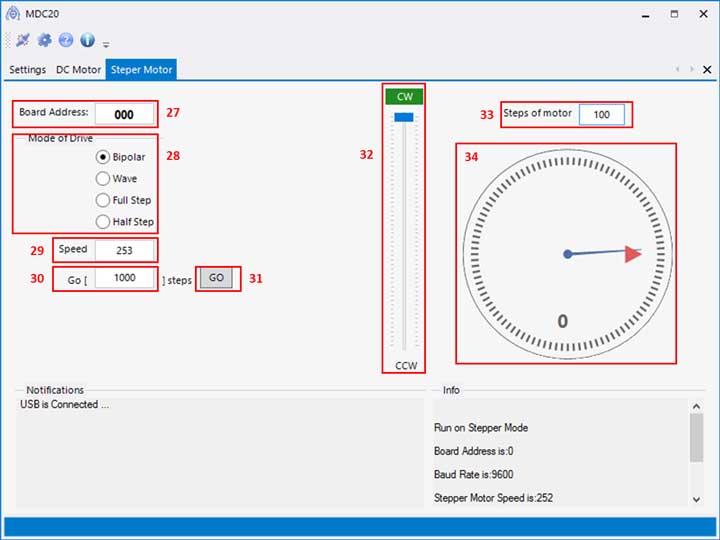
مد راه اندازی موتور Stepper درایور MDC20
۲۷ – آدرس بوردی که قرار است با آن کار کنید.
۲۸ – حالت راه اندازی موتور پلهای (جهت درک بهتر مدهای انکودر به دفترچه راهنمای درایور مراجعه نمایید).
۲۹ – در این قسمت سرعت پیمودن گامهای موتور را به میلیثانیه مشخص میکنید. (در صورت منفی بودن موتور پادساعت گرد خواهد بود).
۳۰ – در این قسمت باید تعداد پلههایی که موتور باید بپیماید را مشخص میکنید.
۳۱ – در صورت کلیک بر روی این دکمه موتور با توجه به مد و سرعت انتخابی شما تعداد گامهای انتخاب شده در گزینه ۳۰ را خواهد رفت.
۳۲ – کار این گزینه مشابه گزینه ۲۹ است.
۳۳ – تعداد پلههای موتور را جهت شبیه سازی مشخص میکند.
۳۴ – موقعیت موتور را نمایش میدهد.
GUI درایور MDC20 را میتوانید از لینک زیر دریافت نمایید.
{kind=link}
{kind=link}
{kind=link}