
درایور موتور دی سی AMD10
۱۰ مرداد ۱۳۹۹درایور موتور دی سی PMD90
۱۰ مرداد ۱۳۹۹
درایور موتور دیسی PMD60A
۱۸,۷۹۰,۰۰۰ تومان
درایور PMD60A یک درایور موتور دیسی توان متوسط میباشد. درایور PMD60A قادر است موتورهای DC تا توان ۵۰۰ وات را راهاندازی نماید. قابلیت تنظیم شتابگیری موتور باعث افزایش طول عمر موتور و افزایش کارایی درایور شده است. درایور را میتوان از طریق کلید ولوم نصب شده بر روی درایور، ولوم خارجی، ولتاژ آنالوگ و یا پالس PWM کنترل کرد.
- ولتاژ کاری ۱۲ تا ۳۶ ولت
- قابلیت جریاندهی تا ۲۰ آمپر به صورت دائمی و ۴۰ آمپر لحظهای
- توان نامی : ۵۰۰ وات
- قابلیت تنظیم سرعت با ولوم روی درایور و یا ولوم خارجی
- قابلیت کنترل سرعت با ولتاژ آنالوگ و پالس PWM
- دارای پتانسیومتر تنظیم شتابگیری موتور
- دارای ورودی فعال و غیرفعال کردن درایور
- محافظت در مقابل اتصال کوتاه در خروجی موتور
- فرکانس کاری ۲۵ کیلوهرتز
- قابلیت نصب برروی تابلو
- باکس فلزی مقاوم در برابر ضربه
- وزن درایور: ۷۰۰ گرم
- ابعاد: ۴۷×۷۶×۱۶۰ میلیمتر

برای دیدن کامل «راهنمای کاربری درایور PMD60A» به تب مربوطه در همین صفحه مراجعه کنید.
راهنمای کاربری درایور AMD10
علائم راهنمای مطالعه این مطلب:
۱- مقدمه
درایور PMD60A یک درایور موتور دیسی توان متوسط میباشد. درایور PMD60A قادر است موتورهای DC تا توان ۵۰۰ وات را راهاندازی نماید. قابلیت تنظیم شتابگیری موتور باعث افزایش طول عمر موتور و افزایش کارایی درایور شده است. درایور را میتوان از طریق کلید ولوم نصب شده بر روی درایور، ولوم خارجی، ولتاژ آنالوگ و یا پالس PWM کنترل کرد.
۲- مشخصات درایور
- ولتاژ کاری ۱۲ تا ۳۶ ولت
- قابلیت جریاندهی تا ۲۰ آمپر به صورت دائمی و ۴۰ آمپر لحظهای
- توان نامی : ۵۰۰ وات
- قابلیت تنظیم سرعت با ولوم روی درایور و یا ولوم خارجی
- قابلیت کنترل سرعت با ولتاژ آنالوگ و پالس PWM
- دارای پتانسیومتر تنظیم شتابگیری موتور
- دارای ورودی فعال و غیرفعال کردن درایور
- محافظت در مقابل اتصال کوتاه در خروجی موتور
- فرکانس کاری ۲۵ کیلوهرتز
- قابلیت نصب برروی تابلو
- باکس فلزی مقاوم در برابر ضربه
- وزن درایور: ۷۰۰ گرم
- ابعاد: ۴۷×۷۶×۱۶۰ میلیمتر
۳- ورودیها و خروجیهای درایور PMD60A
درایور دارای ورودی تغذیه، خروجی موتور، پتانسیومتر تنظیم شتابگیری موتور، سوکت ورودیهای کنترلی و کلید ولوم تنظیم سرعت و انتخاب مد کنترلی میباشد. در شکل ۱ میتوانید اتصالات درایور را مشاهده نمایید.

شکل ۱: ورودی و خروجیهای درایور PMD60A
۱) خروجی موتور
دو سیم موتور را به این خروجی متصل نمایید.
۲) ورودی تغذیه
تغذیه ۱۲ تا ۳۶ ولت DC را به این سوکت با رعایت پلاریته (VCC به مثبت و GND به منفی) متصل نمایید.
۳) پتانسیومتر تنظیم شتابگیری موتور
با این پتانسیومتر میتوانید نرخ شتاب گرفتن موتور را تنظیم نمایید. مطابق شکل ۲ با چرخاندن این پتانسیومتر در جهت خلاف عقربههای ساعت میزان شتاب موتور کاهش خواهد یافت.

شکل ۲: جهت چرخش پتانسومتر تنظیم شتاب
۴) ورودیهای کنترلی
سوکت ورودیهای کنترلی درایور در شکل ۳ نشان داده شده است. ورودیهای این قسمت جهت فعال و غیرفعال کردن درایور، اتصال ولوم خارجی و یا اعمال ولتاژ آنالوگ (یا پالس PWM) مورد استفاده قرار میگیرند.

شکل ۳: ورودیهای کنترلی درایور
- ورودی فعال و غیرفعال کردن درایور (EN/DIS)
این ورودی جهت فعال و غیرفعال کردن درایور استفاده میشود. با اعمال سطح ولتاژ ۳٫۳ ولت درایور فعال و با اعمال سطح ولتاژ صفر درایور غیرفعال میگردد. در صورت عدم اتصال این ورودی به ولتاژ ۳٫۳ ولت یا صفر ولت، درایور فعال میباشد.
- ورودیهای زمین (GND)
ورودیهای زمین در واقع زمین بخش سیگنال درایور میباشند که بایستی همواره به زمین کنترلر خارجی (PLC، آردوینو، یا هر برد تولید کننده سیگنال کنترلی) متصل گردند.
- ورودی آنالوگ و پالس (AN/PWM)
این ورودی با دریافت ولتاژ آنالوگ ۰ تا ۳٫۳ ولت و یا پالس PWM با فرکانس ۵۰۰ تا ۱ کیلوهرتز سرعت موتور را کنترل میکند.
- خروجی +3.3V
این خروجی به هنگام اتصال پتانسیومتر خارجی مورد استفاده قرار میگیرد.
۵) ولوم تنظیم سرعت و انتخاب مد
با استفاده از این کلید ولوم میتوانید مد عملیاتی درایور را انتخاب نموده و سرعت موتور را کنترل نمایید. در صورتی که کلید ولوم را در جهت خلاف عقربههای ساعت بچرخانید تا اینکه کلیدش خاموش شود، درایور در مد عملیاتی خارجی قرار خواهد گرفت (کنترل از طریق پتانسومتر خارجی، ولتاژ آنالوگ و پالس PWM). اما چنانچه کلید ولوم در حالت روشن قرار داده شود (شکل ۴)، درایور وارد مد عملیاتی داخلی (کنترل از طریق ولوم روی درایور) خواهد شد.

شکل ۴: قرار دادن درایور در مد عملیاتی داخلی(تنظیم سرعت از طریق ولوم روی درایور)
۴- راه اندازی سریع درایور PMD60A
۱- کلید ولوم روی درایور را در جهت عقربههای ساعت بچرخانید تا کلید آن روشن شود و ولوم را در همان ابتدای رنج قرار دهید. دقت کنید که ممکن است از همان اول کلید ولوم در حالت روشن باشد که بایستی به آرامی ولوم را در جهت خلاف عقربههای ساعت بچرخانید تا زمانی که در ابتدای رنج و قبل از خاموش شدن کلید قرار گیرد.
۲- موتور را به خروجی درایور متصل کنید.
۳- تغذیه درایور را وصل نمایید (در هنگام اتصال تغذیه دقت شود که پلاریته مثبت و منفی منبع تغذیه را به درستی به ورودی تغذیه درایور متصل کنید).
۴- اکنون میتوانید با چرخاندن ولوم در جهت عقربههای ساعت سرعت موتور را کنترل نمایید.
۵- اتصال درایور PMD60A به مدارهای فرمان خارجی
در این قسمت انواع روشهای اتصال درایور به مدارهای فرمان خارجی و یا کنترلر خارجی ترسیم شده و توضیحات لازم داده شده است. در صورتی که با توجه به نقشههای این بخش نتوانستید نیاز خود را برطرف کنید جهت مشاوره با شرکت تماس بگیرید.
۱-۵- راه اندازی درایور با حداقل سیمکشی
شکل ۵ نحوه سیمکشی به منظور راهاندازی درایور با حداقل سیم کشی لازم را نشان داده است. برای این منظور قبل از اتصال تغذیه ابتدا ولوم روی درایور را در جهت عقربههای ساعت اندکی بچرخانید تا کلیدش روشن شود. سپس موتور را به خروجی موتور درایور وصل کرده و در صورت نیاز میتوانید از یک میکرو سوئیچ جهت غیرفعال کردن درایور در شرایط اضطراری استفاده کنید. در نهایت تغذیه درایور را متصل نمونده و با چرخاندن ولوم روی درایور در جهت عقربههای ساعت سرعت موتور را کنترل کنید.

شکل ۵: راهاندازی درایور PMD60A با حداقل سیم کشی لازم
۲-۵- کنترل سرعت موتور به وسیله ولوم خارجی
در صورتی که بخواهید سرعت موتور را از طریق ولوم خارجی کنترل نمایید قبل از اتصال تغذیه مطابق شکل ۶ ولوم روی درایور را در جهت خلاف عقربههای ساعت بچرخانید تا کلیدش خاموش شود (ممکن است از همان ابتدا ولوم در حالت خاموش باشد) سپس ولوم خارجی و میکروسوئیچ را به سوکت درایور متصل کنید. پس از اتصال موتور به خروجی، تغذیه درایور را برقرار نموده و در نهایت با چرخاندن ولوم خارجی میتوانید سرعت موتور را تنظیم نماید.

شکل ۶: کنترل سرعت موتور به وسیله ولوم خارجی
۳-۵- کنترل سرعت موتور از طریق ولتاژ آنالوگ ۰ تا ۱۰ ولت با PLC با خروجی NPN
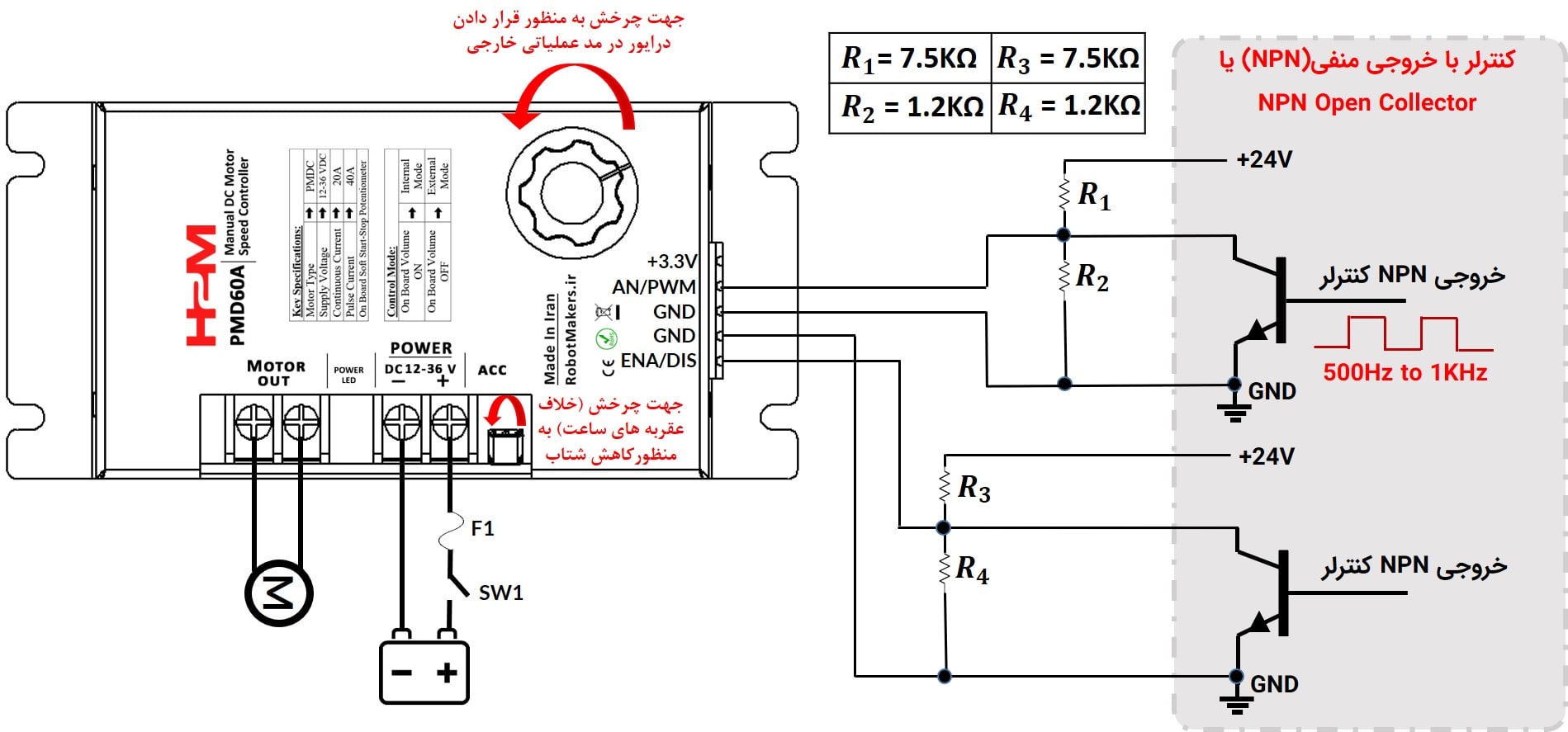
به منظور کنترل سرعت موتور از طریق ولتاژ آنالوگ ۰ تا ۱۰ ولت باید مطابق شکل ۷ از مدار تقسیم مقاومتی ارائه شده استفاده نمایید. همچنین جهت فعال و غیرفعال کردن درایور از طریق خروجی NPN کنترلر (PLC) مدار تقسیم مقاومتی مورد نیاز و نحوه اتصالات ترسیم شده است.

شکل ۷:کنترل درایور از طریق ولتاژ آنالوگ به وسیله PLC با خروجی NPN
در صورتی که مطابق شکل ۷ مقاومتهای پیشنهادی در دسترس نبود بایستی طبق فرمولهای زیر مقادیر این مقاومتها را انتخاب نمایید. دقت شود که مقادیر مقاومتهای انتخابی بایستی بیشتر از ۱ کیلواهم باشند.
۴-۵- کنترل سرعت موتور از طریق پالس PWM به وسیله PLC با خروجی NPN
به منظور کنترل سرعت موتور از طریق پالس PWM باید مطابق شکل ۸ از مدار تقسیم مقاومتی ارائه شده استفاده نمایید. همچنین جهت فعال و غیرفعال کردن درایور از طریق خروجی NPN کنترلر (PLC) مدار تقسیم مقاومتی مورد نیاز و نحوه اتصالات ترسیم شده است.
شکل ۸: کنترل درایور از طریق پالس PWM به وسیله PLC با خروجی NPN
در صورتی که مطابق شکل ۸ مقاومتهای پیشنهادی در دسترس نبود بایستی طبق فرمولهای زیر مقادیر این مقاومتها را انتخاب نمایید. دقت شود که مقادیر مقاومتهای انتخابی بایستی بیشتر از ۱ کیلواهم باشند.
۵-۵- کنترل سرعت موتور از طریق ولتاژ آنالوگ ۰ تا ۱۰ ولت با PLC با خروجی PNP

شکل ۹: کنترل درایور از طریق ولتاژ آنالوگ به وسیله PLC با خروجی PNP
۶-۵- کنترل سرعت موتور از طریق پالس PWM به وسیله PLC با خروجی PNP

شکل ۱۰: کنترل درایور از طریق پالس PWM به وسیله PLC با خروجی PNP
۷-۵- کنترل درایور با آردوینو یا بردهای میکروکنترلی با منطق ۵ ولت
به منظور کنترل سرعت موتور با آردوینو یا میکروکنترلر با منطق ۵ ولت از طریق پالس PWM باید مطابق شکل ۱۱ از مدار تقسیم مقاومتی ارائه شده استفاده نمایید.

شکل ۱۱: کنترل درایور از طریق پالس PWM به وسیله آردوینو یا میکروکنترلر با منطق ۵ ولت
در صورتی که مطابق شکل ۱۱ مقاومتهای پیشنهادی در دسترس نبود بایستی طبق فرمولهای زیر مقادیر این مقاومتها را انتخاب نمایید.
۸-۵- کنترل درایور با آردوینو یا بردهای میکروکنترلی با منطق ۳٫۳ ولت
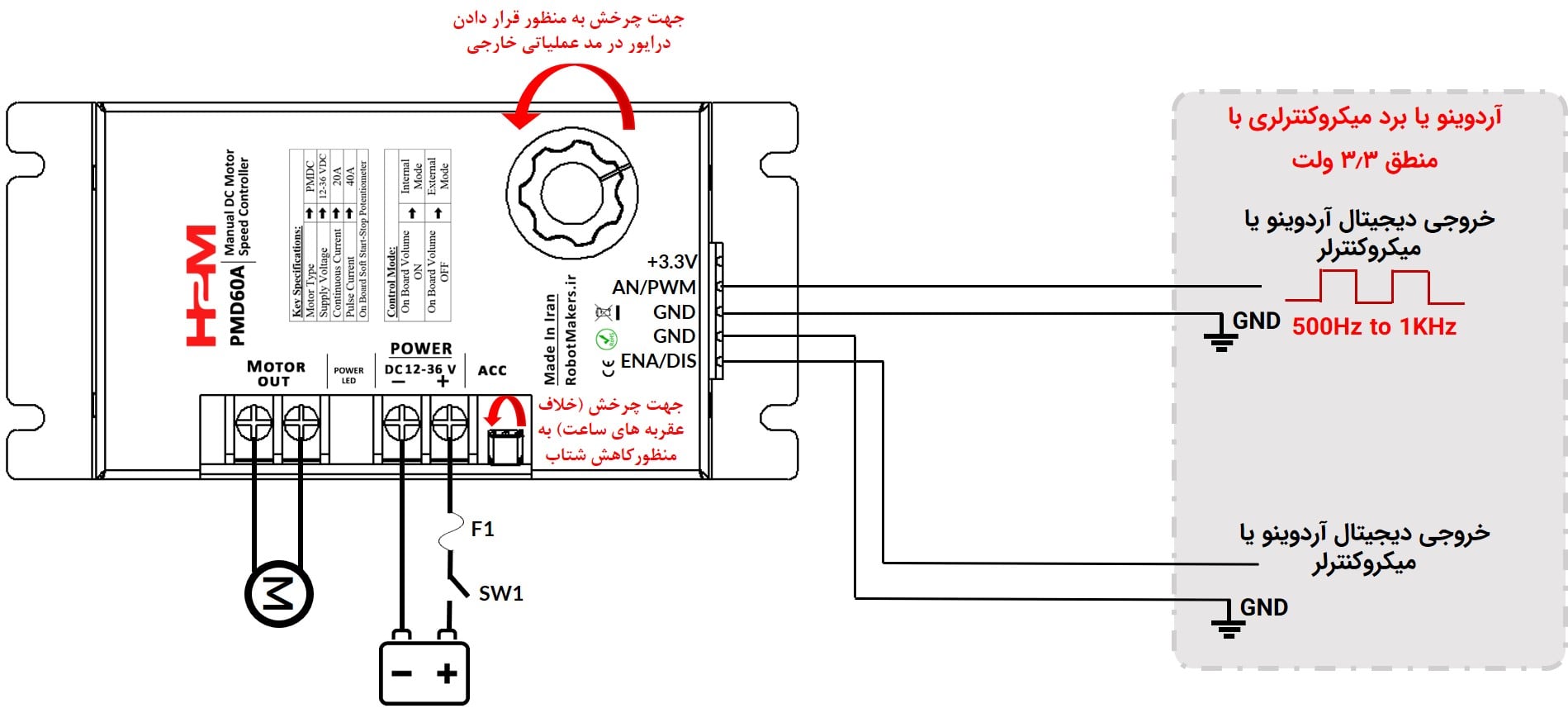
شکل ۱۲: کنترل درایور از طریق پالس PWM به وسیله آردوینو یا میکروکنترلر با منطق ۳/۳ ولت
۶- مشخصات الکتریکی درایور PMD60A
|
پارامتر |
حداقل |
رایج |
حداکثر |
واحد |
|
ولتاژ تغذیه |
10 |
24 |
36 |
ولت(V) |
|
ریسک حداکثر ولتاژ باس |
– |
– |
40 |
ولت(V) |
|
ریسک حداقل ولتاژ باس |
8 |
– |
– |
ولت(V) |
|
جریان دهی دائم |
– |
20 |
– |
آمپر(A) |
|
جریان دهی لحظه ای |
– |
40 |
– |
آمپر(A) |
|
توان خروجی |
– |
500 |
– |
وات(W) |
|
توان اتلافی |
– |
27 |
– |
وات(W) |
|
بازده درایور |
– |
90 |
– |
درصد(%) |
|
مقدار خازن باس |
– |
4400 |
– |
میکرو فاراد(µF) |
|
حداقل اندوکتانس قابل اتصال به درایور |
50 |
– |
– |
میکرو هانری(Hµ) |
|
فرکانس سوئیچینگ |
– |
25 |
– |
کیلوهرتز(kHz) |
|
حداکثر پهنای پالس خروجی |
– |
– |
95 |
درصد(%) |
|
منطق ورودیهای سیگنال |
– |
3.3 |
– |
ولت(V) |
۷- نقشه مکانیکی درایور PMD60A
شکل ۱۳: نقشه مکانیکی درایور PMD60A
دانلود راهنمای کاربری درایور PMD60A
به منظور استفاده هر چه بهتر و صحیحتر از درایور PMD60A، حتما دفترچه راهنمای آن که در لینک زیر قرار گرفته را دانلود و با دقت مطالعه نمایید.
جهت مشاهده نسخه آنلاین «راهنمای کاربری درایور PMD60A» به تب «راهنمای کاربری» در همین صفحه مراجعه فرمایید.
دانلود فایل سهبُعدی درایور PMD60A
جهت دیدن مدل سهبعدی محصول PMD60A فایل STEP. را از لینک زیر دانلود کرده و در نرمافزارهای مربوطه مشاهده فرمایید.
جهت مشاهده نسخه آنلاین «مدل سهبُعدی درایور PMD60A» به تب «مدل سهبُعدی» در همین صفحه مراجعه فرمایید.
برای استفاده هر چه بهتر از این درایور می توانید به مقالات آموزشی زیر در بلاگ آموزشی شرکت مراجعه نمایید.
برای استفاده هر چه بهتر از این درایور می توانید به آموزش های زیر مراجعه نمایید:
معرفی و نمایش عملکرد درایور PMD60:
شرایط گارانتی محصولات شرکت ربات سازان
این محصول دارای ۸ ماه گارانتی میباشد. چنانچه محصول تحت شرایط کار نامی خود به مشکل بخورد شرکت بدون دریافت هزینه اشکالات احتمالی را برطرف خواهد کرد.
شرایط ابطال گارانتی:
۱- آسیب دیدن در اثر جریان بیش از حد که باعث ذوب شدن مسیرهای برد مدار چاپی محصول خواهد شد. درایور دارای یک جریان دهی دائمی و یک جریان دهی لحظهای میباشد. هرگز نباید جریانی که به صورت پیوسته از درایور عبور میکند از جریان دهی دائمی آن بیشتر شود. حتما قبل از تغذیه درایور یک عدد فیوز قرار دهید. جریان فیوز نباید بیشتر از جریان دهی دائمی درایور باشد.
۲- آسیب دیدن در اثر شرایطی که اتصال کوتاه در خروجی درایور رخ دهد. اگر سیمهای موتور دارای پارگی باشند و به یکدیگر متصل شوند اتصال کوتاه در خروجی موتور درایور رخ میدهد که باعث آسیب رسیدن به درایور خواهد شد.
۳- آسیب دیدن تحت شرایطی که یکی از خروجیهای موتور درایور به زمین یا تغذیه اتصال یابد.
۴- آسیب دیدن در اثر استفاده از درایور در محیطهای مرطوب و یا پر از گرد و غبار و پلیسههای رسانا. استفاده از درایور در محیطهای مرطوب میتواند منجر به نفوذ رطوبت به داخل درایور گردد. این رطوبت میتواند در قطعاتی که فاصله پایههای آن بسیار نزدیک به هم میباشد رسانایی ایجاد کرده و منجر به صدمه رساندن به درایور شود. همچنین نفوذ گرد و غبار به تشدید این شرایط کمک خواهد کرد. استفاده از درایور در دستگاههای ماشین کاری فلزات میتواند منجر به نفوذ پلیسه به داخل درایور و ایجاد اتصال کوتاه در بین پایههای قطعات گردد. در چنین شرایطی باید حتما درایور داخل یک قاب دیگر که مقاوم در برابر رطوبت و نفوذ گرد و غبار و پلیسه هست قرار گیرد.
۵- در صورتیکه درایور به هر دلیلی به مشکل خورده است و مشتری اقدام به باز کردن قاب درایور و دستکاری سخت افزاری آن نماید.
۶- چنانچه مشتری اقدام به سوراخکاری قسمتی از بدنه و یا هیت سینک نماید و درایور دچار آسیب شود. دلیل صدمه دیدن درایور تحت این شرایط میتواند ناشی از نفوذ پلیسه به داخل درایور و یا خراب شدن قطعات در اثر ارتعاش ناشی از سوراخکاری باشد.
۷- آسیب دیدن درایور در اثر اضافه ولتاژ ایجاد شده به هنگام کاهش سرعت با نرخ بالا. چنانچه باری که به شفت موتور متصل کردهاید دارای ممان اینرسی بالایی باشد به هنگام ترمزگیری شدید توان مکانیکی موجود در ممان دوار به سمت درایور جاری شده و باعث افزایش ولتاژ در لاین خط تغذیه میشود. اگر سطح ولتاژ به حدی افزایش یابد که بیشتر از حد تحمل درایور گردد میتواند منجر به آسیب رساندن به درایور شود. در صورتیکه باری با ممان اینرسی بالا دارید و ناچار هستید با نرخ بالا عمل کاهش سرعت را انجام دهید حتما باید از مقاومت ترمزی مناسب استفاده کنید. اگر امکان استفاده از مقاومت ترمزی وجود ندارد باید کاهش سرعت را با نرخی انجام دهید که هرگز اضافه ولتاژ ایجاد شده بیشتر از حد تحمل درایور نگردد. برخی از درایورهای شرکت ربات سازان دارای یک ولوم تنظیم شتاب میباشند که با استفاده از این ولوم میتوانید شیب افزایش و یا کاهش سرعت را تنظیم نمایید.
۸- آسیب رسیدن به درایور در اثر جابهجا زدن پلاریته تغذیه درایور. به هنگام اتصال تغذیه همواره به پلاریته آن دقت نمایید.
۹- آسیب رسیدن به درایور در اثر وصل کردن تغذیه به خروجی موتور!
۱۰- آسیب رسیدن به درایور در اثر وصل کردن آن به تغذیهای با ولتاژی بیشتر از ولتاژ نامی درایور.
سوالات متداول در مورد درایور AMD60A
1 دیدگاه برای درایور موتور دیسی PMD60A
محصولات مرتبط
-
درایور موتور دی سی PMD90
۳۳,۰۳۰,۰۰۰ تومان -
درایور MD5
برای قیمت تماس بگیرید -
سرو درایور AMD60
۵۷,۵۸۰,۰۰۰ تومان
حکمت –
سلام و خسته نباشید
فیلم گذاشته شده کیفیت پایینی داره و مشخص نیست که چند آمپر داره موتور میکشه، امکان گذاشتن فیلم با کیفیت داخل سایت می باشد، آیا این درایور واقعا تحمل ۴۰ آمپر لحظه ای را دارد؟ ۲۰ آمپر مداوم از این درایور کشیده شده است؟
دستگاهی که ما داریم نیاز به ۱۵ تا ۲۰ آمپر مداوم دارد، چون چند نوع درایور را امتحان کرده ایم، میخواستیم از تحمل کردن درایور مطمین بشیم.
محمود حسن پور دهنوی –
سلام.
بله درایور به صورت دائمی میتونه تا ۲۰ آمپر جریان دهی داشته باشه. فیلم با کیفیت به زودی تهییه رو روی سایت قرار میگیره.