
درایور موتور دیسی PMD60A
۱۰ مرداد ۱۳۹۹سرو درایور AMD60
۱۰ مرداد ۱۳۹۹
درایور موتور دی سی PMD90
۳۳,۰۳۰,۰۰۰ تومان
درایور موتور دی سی PMD90 یک کنترل کننده سرعت موتورهای دی سی ۱۲ تا ۴۸ ولت و با قابلیت جریان دهی تا ۳۰ آمپر میباشد. این درایور بدون نیاز به انکودر قادر است سرعت موتور دی سی را در شرایطی که بار متصل به آن تغییر مینماید ثابت نگه دارد. درایور PMD90 با کنترل بهینه ولتاژ و جریان موتور باعث افزایش طول عمر موتور خواهد شد. همچنین ماکزیمم جریان خروجی قابل تنظیم بوده تا از صدمات احتمالی به موتور و منبع تغذیهی آن جلوگیری نماید.
- توان نامی: ۷۶۸ وات (قابلیت سفارشی سازی تا ۱٫۲ کیلو وات)؛
- قابلیت جریان دهی تا ۳۲ آمپر به صورت دائم کار و ۶۰ آمپر به صورت لحظهای (قابلیت سفارشی سازی تا ۵۰ آمپر به صورت دائم کار و ۱۰۰ آمپر لحظهای)؛
- رنج ولتاژ کاری ۱۵ الی ۴۸ ولت دی سی (قابلیت کاهش رنج پایین تا ۱۰ ولت و رنج بالا تا ۱۲۰ ولت دیسی به صورت سفارشی)؛
- کنترل سرعت موتور DC با ولتاژ آنالوگ ۰ تا ۱۰ ولت (امکان سفارشی سازی به صورت ۰ تا ۵ ولت)؛
- کنترل جهت موتور با ولتاژ ۰ ولت برای حرکت در جهت ساعتگرد و ولتاژ ۱۰ ولت برای حرکت در جهت پاد ساعتگرد (امکان سفارشی سازی سطح ولتاژ به صورت ۵ ولت و یا ۲۴ ولت)؛
- امکان اعمال پالس PWM به ورودی آنالوگ (درایور به صورت خودکار پالس را تشخیص داده و مد را تغییر میدهد)؛
- دارای دو مد حلقه باز و حلقه بسته؛
- شناسایی اتوماتیک پارامترهای موتور دیسی (مقاومت و اندوکتانس سیم پیچ موتور)؛
- دارای حلقه کنترل جریان خود تنظیم (Auto-Tuning Current Loop)؛
- قابلیت کنترل سرعت موتور به صورت سنسورلس (بدون نیاز به انکودر یا تاکو ژنراتور)؛
- محافظت در برابر جریان کشی بیش حد؛
- محافظت در برابر جابجا زدن ورودی تغذیه (Reverse Polarity Protection)؛
- محافظت در برابر اتصال کوتاه در خروجی موتور؛
- فرکانس کاری ۲۵ کیلوهرتز؛
- قابلیت تنظیم شتاب گیری موتور (سافت استارت استاپ)؛
- قابلیت نصب بر روی تابلو (Panel Mount)؛
- وزن درایور: ۱٫۲ کیلوگرم؛
- ابعاد: 192x114x52 میلیمتر.

تصویر شماتیک از ابعاد درایور PMD90 (برای دیدن تصویر بزرگتر کلیک کنید)
ویدئوی معرفی درایور موتور دی سی ۲۴ ولت ۳۰ آمپر PMD90
راهنمای کاربری درایور PMD90
علائم راهنمای مطالعه این مطلب:
۱- مقدمه
درایور PMD90 از سری درایورهای موتور مغناطیس دائم میباشد. این درایور قادر است به دو صورت حلقه باز و حلقه بسته سرعت و گشتاور موتور دیسی مغناطیس دائم را کنترل نماید. حالت حلقه بسته شامل دو مد کنترل سرعت سنسورلس و کنترل گشتاور خود تنظیم میباشد. درایور PMD90 با شناسایی خودکار پارامترهای الکتریکی موتور لوپ کنترل گشتاور را به صوت خود تنظیم برقرار مینماید. همچنین این درایور با تخمین سرعت موتور نیاز به انکودر و سایر سنسورهای سرعت را حذف کرده و به صورت سنسورلس سرعت موتور را کنترل میکند به گونهای که با تغییر بار متصل به شفت موتور سرعت آن ثابت خواهد ماند.
۲- مشخصات اجمالی درایور PMD90
- قابلیت جریان دهی تا ۳۲ آمپر به صورت دائم کار و ۶۴ آمپر به صورت لحظهای (قابلیت سفارشی سازی تا ۵۰ آمپر به صورت دائم کار و ۱۰۰ آمپر لحظهای)
- ولتاژ کاری ۱۵ الی ۴۸ ولت دیسی (قابلیت کاهش رنج پایین تا ۱۰ ولت و رنج بالا تا ۱۲۰ ولت دیسی به صورت سفارشی)
- کنترل سرعت موتور DC با ولتاژ آنالوگ ۰ تا ۱۰ ولت (امکان سفارشی سازی به صورت ۰ تا ۵ ولت)
- کنترل جهت موتور با ولتاژ ۰ ولت برای حرکت در جهت ساعتگرد و ولتاژ ۱۰ ولت برای حرکت در جهت پاد ساعتگرد (امکان سفارشی سازی سطح ولتاژ به صورت ۵ ولت و یا ۲۴ ولت)
- امکان اعمال پالس PWM به ورودی آنالوگ (درایور به صورت خودکار پالس را تشخیص داده و مد را تغییر میدهد)
- دارای دو مد حلقه باز و حلقه بسته
- شناسایی اتوماتیک پارامترهای موتور دیسی (مقاومت و اندوکتانس سیم پیچ موتور)
- دارای حلقه کنترل جریان خود تنظیم (Auto-Tuning Current Loop)
- قابلیت کنترل سرعت موتور به صورت سنسورلس (بدون نیاز به انکودر یا تاکو ژنراتور)
- دارای مد کنترل گشتاور خود تنظیم (Auto-Tuning Torque Control)
- محافظت در برابر جریان کشی بیش حد
- محافظت در برابر جابجا زدن ورودی تغذیه (Reverse Polarity Protection)
- محافظت در برابر اتصال کوتاه در خروجی موتور
- فرکانس کاری ۲۵ کیلوهرتز
- قابلیت تنظیم شتاب گیری موتور (سافت استارت/استاپ)
- قابلیت نصب بر روی تابلو (Panel Mount)
- وزن درایور: ۱٫۲ کیلوگرم
- ابعاد: 192x114x52 میلیمتر
۳- کاربردهای متنوع درایور PMD90
- اتوماسیون، CNC و رباتیک صنعتی
- سیستم های ترکشن
- وسایل نقلیه الکتریکی (اسکوتر، دوچرخه برقی، موتور سیکلت برقی، ربات های متحرک، خودروهای الکتریکی کوچیک)
- نوار نقاله
- دستگاه های جوجه کشی، بافندگی و …
- صنایع چاپ و بسته بندی
- تجهیزات آزمایشگاهی
- صنایع غذایی، نوشیدنی و دارویی
- صنایع و ماشین آلات دام و طیور
- کار با این درایور بسیار ساده میباشد. اما برای جلوگیری از بروز اشتباه و آسیب به درایور، حتما راهنمای کاربری را با دقت مطالعه فرمایید.
- هرگز بدون اتصال موتور، فرآیند شناسایی و کالیبراسیون را انجام ندهید.
- در تنظیم بهرههای مربوط به کنترلر سرعت دقت کافی را داشته باشید تا منجر به ناپایداری نشود.
- جهت اجتناب از برگشت توان و صدمه دیدن درایور در صورتی که کاهش سرعت تند و یا تغییر جهت ناگهانی در سیستم دارید حتما از حرکت شتاب دار استفاده کنید (تنظیم پتانسومتر ACC). در صورتی که امکان استفاده از حرکت شتاب دار وجود ندارد حتما باید از ترمز حرارتی خارجی قبل از درایور استفاده کنید تا مانع از افزایش ولتاژ باس و آسیب درایور به هنگام کاهش سرعت شدید و تغییر جهت ناگهانی شود.
- ولتاز نامی تغدیه ۲۴ ولت میباشد. هرگز پیک این ولتاژ از ۴۸ ولت تجاوز نکند.
- حتما با مراجعه به صفحه درایور PMD90 در وب سایت شرکت فیلم های آموزشی را ببینید.
۴- ورودی خروجیهای درایور PMD90
درایور PMD90 از بخشهای زیر تشکیل شده است:
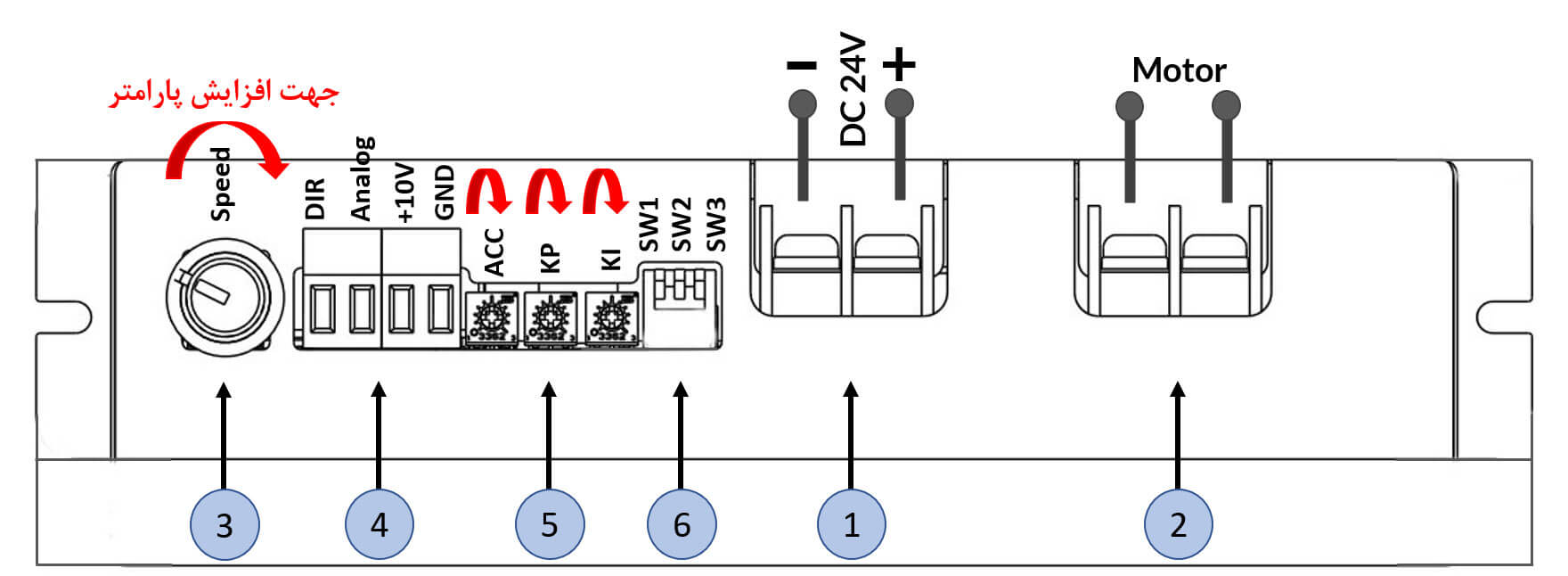
شکل ۱) ورودی، خروجی و سیگنال های کنترلی درایور PMD90
1 ورودی تغذیه درایور
تغذیه درایور PMD90 ولتاژ دیسی ۱۵ الی ۴۸ ولت میباشد. دقت شود که منبع تغذیه متناسب با بار مورد نیاز انتخاب گردد. به عنوان مثال در صورتی که از موتوری با جریان نامی ۱۵ آمپر استفاده مینمایید، حتما بایستی منبع تغذیه ۱۵ آمپری انتخاب نمایید (در صورت نیاز به شتاب گرفتن ناگهانی باید قابلیت جریان دهی منبع تغذیه حتی به چند برابر جریان نامی موتور افزایش یابد). به هنگام اتصال منبع تغذیه به پلاریته آن دقت نمایید (در صورت اشتباه زدن پلاریته درایور مجهز به حفاظت پلاریته معکوس میباشد).
2 خروجی تغذیه درایور
این قسمت خروجی درایور میباشد که بایستی به موتور دیسی مغناطیس دائم متصل گردد.
3 کلید ولوم تنظیم مد عملیاتی داخلی یا خارجی، سرعت و یا گشتاور
این قسمت مربوط به کلید ولوم داخلی (On-Board) جهت تنظیم مد عملیاتی داخلی یا خارجی، سرعت و یا گشتاور موتور میباشد. درایور PMD90 دارای دو مد عملیاتی داخلی و خارجی بوده به گونه ای که در مد عملیاتی داخلی، تنظیم سرعت و یا گشتاور با استفاده از ولوم تعبیه شده بر روی درایور انجام میپذیرد و در صورتی که بخواهید سرعت و یا گشتاور موتور را با استفاده از پتانسیومتر خارجی، ولتاژ آنالوگ ۰ تا ۱۰ ولت و یا پالس PWM کنترل نمایید بایستی ولوم را در جهت پاد ساعتگرد بچرخانید تا کلید ولوم خاموش شود سپس میتوانید سرعت و یا گشتاور موتور را با استفاده از پتانسیومتر خارجی، ورودی آنالوگ ۰ تا ۱۰ ولت و یا پالس PWM کنترل نمایید.
4 سوکت فرمان های خارجی
این بخش سوکت مربوط به فرمان های خارجی میباشد. با استفاده از این سوکت قادر خواهید بود سرعت، گشتاور و جهت موتور را کنترل نمایید. این سوکت دارای سیگنالهای کنترلی زیر میباشد:
- ورودی Analog: سیگنال آنالوگ ۰ تا ۱۰ ولت و یا پالس PWM جهت تنظیم سرعت و یا گشتارو موتور؛
- ورودی DIR: اعمال سینگال ولتاژ ۰ یا ۱۰ ولت جهت تنظیم جهت چرخش موتور؛
- خروجی 10V+: تغذیه ۱۰ ولت برای اتصال ولوم خارجی و یا مصارف کمتر از ۲۰۰ میلی آمپر؛
- زمین GND: زمین سوکت سیگنال (این زمین به زمین تغذیه درایور به صورت الکتریکی متصل میباشد).
5 پتانسیومترهای تنظیمات شتاب و بهره های کنترلی
در این بخش پتانسیومترهای مربوط به تنظیم سافت استارت/استاپ (شروع و توقف حرکت موتور به صورت نرم) و بهرههای کنترلر سرعت در مُد سنسورلس قرار دارند. پتانسیومتر ACC مربوط به تنظیم سافت استارت/استاپ میباشد، به گونه ای که هر اندازه پتانسیومتر را در جهت ساعتگرد بچرخانیم میزان شتاب موتور کاهش مییابد (موتور دیرتر به سرعت تنظیم شده میرسد). پتانسیومترهای KP و KI مربوط به تنظیم بهرههای کنترلر سرعت در مد سنسورلس میباشند که نحوهی عملکرد آن ها در قسمت مدهای کنترلی درایور توضیح داده شده است.
6 دیپ سوئیچهای مربوط به تنظیم مدهای کنترلی و حداکثر جریان خروجی
این دیپ سوئیچها مربوط به تنظیم مدهای کنترلی و حداکثر جریان خروجی میباشند. عملکرد هر دیپ سوئیچ پیانوئی در شکل ۲ نشان داده شده است.

شکل ۲) عملکرد دیپ سوئیچ های پیانوئی
• دیپ سوئیچ SW1: از این دیپ سوئیچ جهت تنظیم مد کنترلی درایور(حلقه باز یا حلقه بسته) و همچنین شروع فرآیند شناسایی پارامترهای موتور در مد حلقه بسته استفاده میشود. در صورتی که دیپ سوئیچ شماره 1 در حالت ON (به سمت پایین) قرار داشته باشد، درایور در حالت کنترل سنسورلس (کنترل سرعت بدون انکودر) قرار میگیرد و در صورتی که دیپ سوئیچ شماره 1 از حالت ON خارج شود (به سمت بالا)، درایور در حالت کنترل حلقه باز قرار خواهد گرفت. همچنین از این دیپ سوئیچ جهت شروع فرآیند شناسایی پارامترهای موتور نیز استفاده میشود که در قسمت مدهای کنترلی توضیح داده خواهد شد.
• دیپ سوئیچ SW2: این دیپ سوئیچ جهت انتخاب مد کنترل سرعت سنسورلس و یا کنترل گشتاور میباشد. در صورتی که دیپ سوئیچ شماره 2 در حالت ON (رو به سمت پایین) قرار داشته باشد درایور در مد کنترل گشتاور عمل خواهد کرد و در صورتی که دیپ سوئیچ شماره 2 از حالت ON خارج شود (رو به سمت بالا) درایور در مد کنترل سرعت سنسورلس عمل خواهد کرد. همچنین در حالت کنترل حلقه باز این دیپ سوئیچ به همراه دیپ سوئیچ شماره 3 جهت تنظیم حداکثر جریان خروجی استفاده میشود.
• دیپ سوئیچ SW3: این دیپ سوئیچ جهت تنظیم حداکثر جریان اعمالی به موتور میباشد.
۵- مدهای عملیاتی درایور PMD90
درایور PMD90 دارای دو مد عملیاتی داخلی یا خارجی میباشد که با استفاده از کلید ولوم روی برد قابل تنظیم میباشند. چنانچه کلید ولوم در حالت روشن قرار داشته باشد سرعت و یا گشتاور موتور با ولوم روی درایور کنترل خواهد شد. در صورتی که بخواهید سرعت و یا گشتاور موتور را با استفاده از پتانسیومتر خارجی، ولتاژ آنالوگ ۰ تا ۱۰ ولت و یا پالس PWM کنترل نمایید بایستی ولوم را در جهت خلاف عقربه های ساعت بچرخانید تا کلید ولوم خاموش شود (شکل ۳) سپس میتوانید سرعت و یا گشتاور موتور را با استفاده از پتانسیومتر خارجی، ورودی آنالوگ ۰ تا ۱۰ ولت و یا پالس PWM کنترل نمایید.

شکل ۳) جهت چرخش کلید ولوم روی درایور جهت وارد شدن به مد عملیاتی خارجی
۶- مدهای کنترلی درایور PMD90
درایور PMD90 دارای دو مد کنترلی حلقه باز و حلقه بسته میباشد. در ادامه به توضیح مدهای کنترلی درایور میپردازیم.
۶-۱- مد کنترلی حلقه باز (Open-Loop)
مد کنترلی حلقه باز یک مد کنترلی ساده و با حاشیه پایداری بالایی میباشد. مطابق توضیحات ذکر شده در قسمتهای قبل در صورتی که دیپ سوئیچ شماره 1 را از حالت ON خارج نمایید (رو به سمت بالا)، درایور وارد مد کنترل حلقه باز خواهد شد. در این مد هیچ گونه عملیات کنترلی روی ولتاژ، جریان و سرعت موتور انجام نمیشود. در مد کنترلی حلقه باز دیپ سوئیچ های شماره 2 و 3 برای تنظیم حداکثر جریان اعمالی به موتور استفاده میشوند. جدول شماره ۱ چهار وضعیت ممکن در حالت مد کنترلی حلقه باز را نشان میدهد.

جدول ۱) حالتهای ممکن در مد کنترلی حلقه باز
در مد کنترلی حلقه باز از بین پتانسیومترهای تنظیمات تنها پتانسیومتر ACC مربوط به تنظیم سافت استارت/استاپ (حرکت و توقف موتور به صورت نرم) کاربرد دارد. مطابق شکل ۴ با چرخاندن پتانسومتر ACC در جهت عقربه های ساعت میزان شتاب موتور کاهش خواهد یافت (موتور دیرتر به سرعت تنظیم شده خواهد رسید).

شکل ۴) جهت چرخش پتانسومتر ACC به منظور کاهش شتاب گیری موتور (دیرتر رسیدن سرعت موتور به سرعت تنظیم شده)
۶-۲- مد کنترلی حلقه بسته (Closed-Loop)
در مد کنترلی حلقه بسته درایور قادر است گشتاور و یا سرعت موتور دیسی مغناطیس دائم را کنترل نماید. در ادامه به توضیح هر یک از این حالت ها میپردازیم.
۶-۲-۱- مد کنترل گشتاور خود تنظیم (Auto-Tuning Torque Control)
در صورتی که دیپ سوئیچ شماره 2 را در وضعیت ON (رو به سمت پایین) قرار دهید، درایور در مد کنترل گشتاور خود تنظیم قرار میگیرد. در مد کنترل گشتاور درایور PMD90 قادر است گشتاور موتور دیسی مغناطیس دائم را به صورت دقیقی کنترل نماید. مد کنترل گشتاور مناسب کاربردهای ترکشن از جمله: رباتهای متحرک، اسکوتر، دوچرخه برقی، موتور سیکلت برقی، وسایل نقلیه الکتریکی و … میباشد. از آنجایی که در کاربردهای ترکشن به عنوان مثال خودروهای الکتریکی حلقه کنترل سرعت توسط انسان کامل میشود (راننده با نگاه به صفحه کیلومتر سرعت خود را با بالا پایین کردن پدال گاز تنظیم میکند) بنابراین استفاده از درایور در مد کنترل گشتاور به افزایش کارایی سیستم منجر میشود.
در مد کنترل گشتاور نیازی به هیچگونه تنظیم بهرههای حلقه کنترل جریان نمیباشد به طوریکه درایور PMD90 با شناسایی پارامترهای موتور حلقههای کنترلی را به صورت خودکار تنظیم میکند. به منظور شناسایی پارامترهای موتور و تنظیم خودکار بهرههای حلقه کنترل جریان قبل از اتصال تغذیه بایستی دیپ سوئیچ شماره 1 در حالت OFF (رو به سمت بالا) و دیپ سوئیچ شماره 2 در حالت ON (رو به سمت پایین) قرار داده شوند. بعد از اتصال تغذیه با قرار دادن دیپ سوئیچ شماره 1 در حالت ON (رو به سمت پایین) فرآیند شناسایی شروع میشود و به مدت ۵ ثانیه طول خواهد کشید.
بعد از اتمام فرآیند شناسایی حلقه کنترل گشتاور به صورت خودکار تنظیم میشود و درایور آماده دریافت سیگنال جریان میباشد. سیگنال جریان با توجه به مد عملیاتی درایور میتواند توسط پتانسیومتر روی درایور و یا از طریق سوکت فرمان خارجی اعمال شود. جدول شماره ۲ حالتهای ممکن در مد کنترل گشتاور را نشان میدهد.

جدول ۲) وضعیت دیپ سوئیچ ها در مد کنترل گشتاور
در صورتی که بعد از اتمام فرآیند شناسایی عملکرد درایور خوب نبود احتمالا شناسایی به درستی انجام نشده است. جهت تکرار فرآیند شناسایی باید وضعیت دیپ سوئیچ شماره 1 را مطابق شکل ۵ تغییر دهید.

شکل ۵) فرآیند تکرار شناسایی پارامترهای موتور در مد کنترل گشتاور
به عبارتی باید یک مرحله دیپ سوئیچ شماره 1 را از حالت ON خارج کرده و مجدد در حالت ON قرار دهید.
۶-۲-۲- مد کنترل سرعت سنسورلس (Sensor-Less Speed Control)
مد کنترل سرعت سنسورلس که از تواناییهای منحصر به فرد درایور PMD90 میباشد قادر است بدون نیاز به انکودر سرعت موتور را کنترل نماید به گونهای که با تغییر بار متصل به شفت موتور و تغییر سطح ولتاژ تغذیهی درایور، سرعت موتور در میزان تنظیم شده ثابت بماند. جهت کار در مد کنترل سرعت سنسورلس قبل از اتصال تغذیه درایور مطابق مراحل زیر عمل نمایید:
- کلید ولوم داخلی را در جهت ساعت گرد تا قبل از خاموش شدن کامل بچرخانید (شکل ۶) و تقریبا در ابتدای رنج قرار دهید (در صورتی که قصد دارید سرعت موتور را به صورت خارجی کنترل نمایید ابتدا مراحل کالیبراسیون را با ولوم داخلی انجام داده و پس از اتمام مراحل کلید ولوم داخلی را در جهت پاد ساعتگرد بچرخانید تا خاموش گردد و درایور وارد مد عملیاتی خارجی شود).
- تمامی پتانسیومترهای کنترلی مربوط به سافت استارت/استاپ و بهرههای کنترلر سرعت را در جهت پاد ساعتگرد تا انتها بچرخانید (شکل ۶).

شکل ۶) جهت و میزان چرخش پتانسومترها قبل از اتصال تغذیه درایور
- دیپ سوئیچ شماره 1 و 2 را در حالت OFF (رو به سمت بالا) قرار دهید (وضعیت دیپ سوئیچ شماره 3 مهم نمیباشد).
- تغذیه درایور را برقرار نمایید.
- بعد از اتصال تغذیه درایور دیپ سوئیچ شماره 1 را از حالت OFF خارج کرده و در حالت ON (رو به سمت پایین) قرار دهید.
- با قرار گرفتن دیپ سوئیچ شماره 1 در حالت ON درایور شروع به شناسایی پارامترهای موتور میکند (جهت اطمینان از انجام مراحل کالیبراسیون بایستی یک لزرش مکانیکی اندکی را در موتور حس نمایید). مرحله شناسایی تقریبا ۵ ثانیه طول میکشد.
- پس از اتمام مراحل کالیبراسیون بایستی بهرههای مربوط به کنترلر سرعت را با استفاده از پتانسیومترهای KP و KI تنظیم نمایید.
- پتانسیومتر مربوط به KP را به آرامی در جهت ساعتگرد چرخانده تا موتور شروع به حرکت نماید (پس از انجام مرحله شناسایی و اتمام کالیبراسیون نیز ممکن است موتور با سرعت اندکی حرکت نماید).
- سپس با اضافه کردن بار به شفت موتور و یا گرفتن شفت موتور (مراقب باشید که به خود آسیبی نرسانید) عدم وابستگی سرعت موتور به تغییر بار را تست نمایید. و در صورت عدم رضایت از عملکرد پتانسومتر KP را آنقدر بچرخانید تا به عملکرد قابل قبولی برسید.
- در صورتی که هنوز به عملکرد مطلوب خود نرسیده اید بایستی پتانسیومتر مربوط به بهره KI را در جهت ساعت گرد اندکی بچرخانید تا جایی که به پاسخ مورد نظر خود برسید. در این مرحله در صورتی که پتانسیومتر KI را بیش از حد بچرخانید ممکن است باعث ناپایداری موتور گردد.
- در صورتی نیاز به حرکت شتاب دار دارید پتانسیومتر ACC را تا رسیدن به شتاب مورد نظر خود در جهت ساعت گرد بچرخانید.
- پس اتمام مراحل فوق درایور آماده کار در مد کنترل سرعت سنسورلس میباشد.
در صورتی که بعد از شناسایی و انجام مراحل فوق عملکرد درایور خوب نبود احتمالا شناسایی به درستی انجام نشده است. جهت تکرار فرآیند شناسایی باید وضعیت دیپ سوئیچ شماره 1 را مطابق شکل ۷ تغییر دهید.

شکل ۷) فرآیند تکرار شناسایی پارامترهای موتور در مد کنترل سرعت سنسورلس
شکل ۸ حالت های ممکن در مد کنترل سرعت سنسورلس را نشان میدهد.

جدول ۳) وضعیت دیپ سوئیچها در مد کنترل سرعت سنسورلس
۷- اتصال درایور به مدارهای فرمان خارجی
در این قسمت انواع روش های اتصال درایور به مدار فرمان خارجی و یا کنترلر خارجی ترسیم شده و توضیحات لازم داده شده است. در صورتی که با توجه به نقشههای این بخش نتوانستید نیاز خود را برطرف کنید جهت مشاوره با شرکت تماس بگیرید.
۷-۱- راه اندازی درایور با حداقل سیمکشی

شکل ۷) راه اندازی درایور با حداقل سیم کشی(مد حلقه باز با حداکثر جریان 32 آمپر و کنترل سرعت با ولوم داخلی)
شکل ۷ حداقل سیمکشی به منظور راه اندازی درایور PMD90 را نشان میدهد. ازآنجایی که کلید کلید-ولم داخلی بسته شده است بنابراین مد عملیاتی درایور مد داخلی میباشد. همچنین با توجه به موقعیت دیپ سوئیچ ها درایور در مد کنترلی حلقه باز و با حداکثر جریان ۳۲ آمپر قرار دارد. مطابق شکل ۷ تغییر سرعت با ولوم روی برد و تغییر جهت با اتصال یک کلید بین خروجی مثبت ۱۲ ولت درایور و ورودی DIR انجام میشود.
در صورتیکه بخواهید تغییر سرعت به صورت دستی با ولوم روی درایور و تغییر جهت را از طریق برد آردوینو که دارای منطق ۵ ولت است انجام دهید مطابق شکل ۸ میتوانید عمل کنید. همانطور که مشاهده میکنید با استفاده از یک رله ۵ ولت که توسط یک دیود و ترانزیستور راه اندازی شده است تغییر جهت با اعمال سیگنال ۰ یا ۵ ولت صورت میپذیرد.
شکل ۷ حداقل سیم کشی به منظور راه اندازی درایور PMD90 را نشان میدهد. ازآنجایی که کلید کلید-ولم داخلی بسته شده است بنابراین مد عملیاتی درایور مد داخلی میباشد. همچنین با توجه به موقعیت دیپ سوئیچها درایور در مد کنترلی حلقه باز و با حداکثر جریان ۳۲ آمپر قرار دارد. مطابق شکل ۷ تغییر سرعت با ولوم روی برد و تغییر جهت با اتصال یک کلید بین خروجی مثبت ۱۲ ولت درایور و ورودی DIR انجام میشود.
منطق ورودی DIR سیگنال ولتاژ مثبت ۱۰ ولت میباشد. در صورت نیاز مشتری تغییر منطبق به سیگنال ولتاژ مثبت ۵ ولت و یا مثبت ۲۴ ولت به صورت سفارشی امکان پذیر میباشد.
در صورتیکه بخواهید تغییر سرعت به صورت دستی با ولوم روی درایور و تغییر جهت را از طریق برد آردوینو که دارای منطق ۵ ولت است انجام دهید مطابق شکل ۸ میتوانید عمل کنید. همانطور که مشاهده میکنید با استفاده از یک رله ۵ ولت که توسط یک دیود و ترانزیستور راهاندازی شده است تغییر جهت با اعمال سیگنال ۰ یا ۵ ولت صورت میپذیرد.

شکل ۸) تغییر سرعت با ولوم داخلی و تغییر جهت با آردوینو (مد حلقه باز با حداکثر جریان 32 آمپر)
۷-۲- راه اندازی درایور از طریق ولوم خارجی
در کاربردهایی که امکان استفاده از ولوم روی خود درایور میسر نمیباشد (به عنوان مثال اسکوتر، دوچرخه برقی، موتور سیکلت برقی و …) میتوان مطابق شکل ۹ با اتصال یک ولوم خارجی سرعت و یا گشتاور موتور را کنترل کرد. همچنین تغییر جهت را نیز میتوان با استفاده از یک کلید خارجی انجام داد. به منظور فعالسازی ولوم خارجی حتما بایستی با استفاده از کلید ولوم روی درایور مد عملیاتی درایور را در حالت خارجی قرار داد. برای این منظور کلید ولوم روی درایور را در جهت خلاف عقربههای ساعت بچرخانید تا در وضعیت خاموش (باز) قرار گیرد.

شکل ۹) تغییر سرعت و جهت با استفاده از ولوم و کلید خارجی (مد حلقه باز با حداکثر جریان ۳۲ آمپر)
۷-۳- راهاندازی درایور با کنترلر خارجی (PLC) با ولتاژ آنالوگ ۰ تا ۱۰ ولت
در بسیاری از کاربردها لازم است که بتوان سرعت (و یا گشتاور) و جهت موتور دیسی مغناطیس دائم را به وسیله PLC کنترل کرد. معمولا PLC ها دارای دو نوع خروجی NPN و PNP هستند. در شکلهای ۱۰ و ۱۱ نحوه اتصال PLC با خروجی NPN و PNP به درایور نمایش داده شده است. دقت شود که حتما مد عملیاتی درایور را با استفاده از کلید ولوم روی درایور در حالت مد عملیاتی خارجی قرار دهید.

شکل ۱۰) راهاندازی درایور با کنترلر (PLC) با خروجی NPN

شکل ۱۱) راه اندازی درایور با کنترلر (PLC) با خروجی PNP
۷-۴- راهاندازی درایور با کنترلر خارجی (PLC) با پالس PWM
درایور PMD90 قادر است علاوه به ولتاژ آنالوگ ۰ تا ۱۰ ولت سرعت و یا گشتاور موتور را از طریق پالس PWM نیز کنترل کند. ازآنجایی که راه اندازی درایور با ولتاژ آنالوگ ۰ تا ۱۰ ولت نیازمند این است که PLC دارای کارت آنالوگ باشد، استفاده از روش PWM میتواند باعث کاهش هزینهها شود. در روش PWM با اعمال یک پالس با فرکانس ثابت (بین ۵ تا ۱۰ کیلوهرتز) و تغییر دیوتی سایکل (نسبت زمان روشن بودن به کل تناوب پالس) میتوان سرعت و گشتاور موتور دیسی مغناطیس دائم را کنترل کرد. در کنترل به روش پالس نیازی به تنظیمات خاصی نبوده و درایور به صورت هوشمند ورودی آنالوگ را از پالس تشخیص میدهد. در شکلهای ۱۲ و ۱۳ نحوه راه اندازی درایور PMD90 با PLC با خروجی NPN و PNP نمایش داده شده است.

شکل ۱۲) راهاندازی درایور با کنترلر (PLC) با خروجی NPN

شکل ۱۳) راهاندازی درایور با کنترلر (PLC) با خروجی PNP
۷-۵- راهاندازی درایور با آردوینو یا برد میکروکنترلی با منطق ۵ ولت یا ۳٫۳ ولت
شکل ۱۴ نحوه راه اندازی درایور PMD90 با آردوینو یا هر برد میکروکنترلی با منطق ۵ ولت را نشان میدهد (مدار برد میکروکنترلی با منطق ۳٫۳ ولت عینا مشابه میباشد). همانطور که مشاهده میکنید از یک مدار تبدیل منطق ۵ ولت به ۱۰ ولت استفاده شده است.

شکل ۱۴) راه اندازی درایور با آردوینو یا برد میکروکنترلی با منطق ۵ ولت
۹- ضمیمه شماره یک: بلوگ دیاگرام درایور PMD90
- شناسایی خودکار پارامترهای الکتریکی موتور؛
- فیلتر کالمن جهت تخمین سرعت؛
- حلقه کنترل گشتاور خود تنظیم؛
- کنترل سرعت سنسورلس؛
- کنترل گشتاور و سرعت موتور دیسی مغناطیس دائم.

شکل ۱۵) بلوگ دیاگرام درایور موتور دیسی مغناطیس دائم PMD90
۱۰- ضمیمه شماره دو: مشخصات الکتریکی درایور PMD90
| پارامتر | حداقل | رایج | حداکثر | واحد |
| ولتاژ تغذیه | 15 | 24 | 48 | ولت(V) |
| ریسک حداکثر ولتاژ باس | – | – | 55 | ولت(V) |
| ریسک حداقل ولتاژ باس | 13 | – | – | ولت(V) |
| جریان دهی دائم | – | 32 | – | آمپر(A) |
| جریان دهی لحظهای | – | 60 | – | آمپر(A) |
| توان خروجی | – | 768 | – | وات(W) |
| توان اتلافی | – | 35 | – | وات(W) |
| بازده درایور | – | 90 | – | درصد(%) |
| مقدار خازن باس | – | 4400 | – | میکرو فاراد(µF) |
| حداقل اندوکتانس قابل اتصال به درایور | 50 | – | – | میکرو هانری(Hµ) |
| فرکانس سوئیچینگ | – | 25 | – | کیلوهرتز(kHz) |
| حداکثر پهنای پالس خروجی | – | – | 95 | درصد(%) |
| زمان نمونه برداری حلقه کنترل گشتاور | – | 40 | – | میکرو ثانیه(µS) |
| زمان نمونه برداری حلقه کنترل سرعت | – | 40 | – | میکرو ثانیه(µS) |
| زمان نمونه برداری فیلتر تخمین زن سرعت | – | 40 | – | میکرو ثانیه(µS) |
| منطق ورودی های سیگنال | – | 10 | – | ولت(V) |
جدول ۴) مشخصات الکتریکی درایور PMD90
۱۱- نقشه مکانیکی درایور PMD90
شکل ۱۶) نقشه مکانیکی درایور PMD90
دانلود راهنمای کاربری درایور PMD90
به منظور استفاده هر چه بهتر و صحیحتر از درایور PMD90، حتما دفترچه راهنمای آن که در لینک زیر قرار گرفته را دانلود و با دقت مطالعه نمایید.
جهت مشاهده نسخه آنلاین «راهنمای کاربری درایور PMD90» به تب «راهنمای کاربری» در همین صفحه مراجعه فرمایید.
دانلود فایل سهبُعدی درایور PMD90
جهت دیدن مدل سهبعدی محصول PMD90 فایل STEP. را از لینک زیر دانلود کرده و در نرمافزارهای مربوطه مشاهده فرمایید.
جهت مشاهده نسخه آنلاین «مدل سهبُعدی درایور PMD90» به تب «مدل سهبُعدی» در همین صفحه مراجعه فرمایید.
برای استفاده هر چه بهتر از این درایور می توانید به مقالات آموزشی زیر در بلاگ آموزشی شرکت مراجعه نمایید.
برای استفاده هر چه بهتر از این درایور قبل از استفاده فیلمهای آموزشی زیر را مشاهده نمایید.
معرفی درایور موتور دی سی ۲۴ ولت ۳۰ آمپر PMD90
در این ویدئو درایور موتور دی سی ۲۴ ولت ۳۰ آمپر PMD90 معرفی شده است. این درایور قادر است سرعت و گشتاور موتور دی سی مغناطیس دائم را در دو حالت حلقه بسته و حلقه باز کنترل نماید. از ویژگی های بارز این درایور کنترل سرعت بدون نیاز به انکودر و یا تاکو ژنراتور می باشد به صورتی که با تغییر بار متصل به شفت موتور سرعت آن ثابت خواهد ماند.
کنترل سرعت موتور بدون نیاز به انکودر توسط درایور PMD90
در این ویدئو قابلیت کنترل سرعت موتور دی سی بدون نیاز به انکودر یا تاکو یا هر سنسور دیگر نشان داده شده است. این قابلیت به هنگام افزایش بار متصل به شفت موتور بسیار کاربردی می باشد. در اکثر درایورهای موجود در بازار سرعت موتور به هنگام افزایش بار کاهش می یابد در صورتی که در درایور PMD90 سرعت موتور به کمک فناوری به کار رفته ثابت خواهد ماند.
کنترل از راه دور دو عدد درایور PMD90 با رادیو کنترل
راه اندازی ۲ عدد درایور PMD90 با رادیو کنترل X9D و گیرنده L9R. با استفاده از این رادیو کنترل میتوانید درایور PMD90 را از راه دور و تا فاصله ۳ کیلومتر کنترل کنید. این کاربرد مناسب رباتهای کنترل از راه دور مثل ربات های امدادگر، بازرسی، کشاورزی و … می باشد. توجه شود که درایوری که در نمایندگی های شرکت در تهران و سایر شهرستانها عرضه میشود طبق کاتالوگ درایور فقط با ولتاژ آنالوگ و پالس PWM قابل کنترل می باشد، جهت کنترل درایور PMD90 با رادیو کنترل باید با شرکت تماس حاصل فرمایید تا برایتان سفارشی سازی شود.
شرایط گارانتی محصولات شرکت ربات سازان
این محصول دارای ۸ ماه گارانتی میباشد. چنانچه محصول تحت شرایط کار نامی خود به مشکل بخورد شرکت بدون دریافت هزینه اشکالات احتمالی را برطرف خواهد کرد.
شرایط ابطال گارانتی:
۱- آسیب دیدن در اثر جریان بیش از حد که باعث ذوب شدن مسیرهای برد مدار چاپی محصول خواهد شد. درایور دارای یک جریان دهی دائمی و یک جریان دهی لحظهای میباشد. هرگز نباید جریانی که به صورت پیوسته از درایور عبور میکند از جریان دهی دائمی آن بیشتر شود. حتما قبل از تغذیه درایور یک عدد فیوز قرار دهید. جریان فیوز نباید بیشتر از جریان دهی دائمی درایور باشد.
۲- آسیب دیدن در اثر شرایطی که اتصال کوتاه در خروجی درایور رخ دهد. اگر سیمهای موتور دارای پارگی باشند و به یکدیگر متصل شوند اتصال کوتاه در خروجی موتور درایور رخ میدهد که باعث آسیب رسیدن به درایور خواهد شد.
۳- آسیب دیدن تحت شرایطی که یکی از خروجیهای موتور درایور به زمین یا تغذیه اتصال یابد.
۴- آسیب دیدن در اثر استفاده از درایور در محیطهای مرطوب و یا پر از گرد و غبار و پلیسههای رسانا. استفاده از درایور در محیطهای مرطوب میتواند منجر به نفوذ رطوبت به داخل درایور گردد. این رطوبت میتواند در قطعاتی که فاصله پایههای آن بسیار نزدیک به هم میباشد رسانایی ایجاد کرده و منجر به صدمه رساندن به درایور شود. همچنین نفوذ گرد و غبار به تشدید این شرایط کمک خواهد کرد. استفاده از درایور در دستگاههای ماشین کاری فلزات میتواند منجر به نفوذ پلیسه به داخل درایور و ایجاد اتصال کوتاه در بین پایههای قطعات گردد. در چنین شرایطی باید حتما درایور داخل یک قاب دیگر که مقاوم در برابر رطوبت و نفوذ گرد و غبار و پلیسه هست قرار گیرد.
۵- در صورتیکه درایور به هر دلیلی به مشکل خورده است و مشتری اقدام به باز کردن قاب درایور و دستکاری سخت افزاری آن نماید.
۶- چنانچه مشتری اقدام به سوراخکاری قسمتی از بدنه و یا هیت سینک نماید و درایور دچار آسیب شود. دلیل صدمه دیدن درایور تحت این شرایط میتواند ناشی از نفوذ پلیسه به داخل درایور و یا خراب شدن قطعات در اثر ارتعاش ناشی از سوراخکاری باشد.
۷- آسیب دیدن درایور در اثر اضافه ولتاژ ایجاد شده به هنگام کاهش سرعت با نرخ بالا. چنانچه باری که به شفت موتور متصل کردهاید دارای ممان اینرسی بالایی باشد به هنگام ترمزگیری شدید توان مکانیکی موجود در ممان دوار به سمت درایور جاری شده و باعث افزایش ولتاژ در لاین خط تغذیه میشود. اگر سطح ولتاژ به حدی افزایش یابد که بیشتر از حد تحمل درایور گردد میتواند منجر به آسیب رساندن به درایور شود. در صورتیکه باری با ممان اینرسی بالا دارید و ناچار هستید با نرخ بالا عمل کاهش سرعت را انجام دهید حتما باید از مقاومت ترمزی مناسب استفاده کنید. اگر امکان استفاده از مقاومت ترمزی وجود ندارد باید کاهش سرعت را با نرخی انجام دهید که هرگز اضافه ولتاژ ایجاد شده بیشتر از حد تحمل درایور نگردد. برخی از درایورهای شرکت ربات سازان دارای یک ولوم تنظیم شتاب میباشند که با استفاده از این ولوم میتوانید شیب افزایش و یا کاهش سرعت را تنظیم نمایید.
۸- آسیب رسیدن به درایور در اثر جابهجا زدن پلاریته تغذیه درایور. به هنگام اتصال تغذیه همواره به پلاریته آن دقت نمایید.
۹- آسیب رسیدن به درایور در اثر وصل کردن تغذیه به خروجی موتور!
۱۰- آسیب رسیدن به درایور در اثر وصل کردن آن به تغذیهای با ولتاژی بیشتر از ولتاژ نامی درایور.
سوالات متداول در مورد درایور PMD90
محصولات مرتبط
-
درایور موتور استپر MSD04
برای قیمت تماس بگیرید -
درایور موتور استپر MSD02
۳,۲۴۰,۰۰۰ تومان -
درایور موتور دیسی PMD60A
۱۸,۷۹۰,۰۰۰ تومان
نقد و بررسیها
هنوز بررسیای ثبت نشده است.