
درایور موتور دی سی PMD90
۱۷ اردیبهشت ۱۴۰۰کنترلر درایور موتور استپر و سرو تک محوره AMC11
۱۷ اردیبهشت ۱۴۰۰
سرو درایور AMD60
۱۶,۸۷۳,۰۰۰ تومان
سرو درایور AMD60 از سری درایورهای موتور دیسی مغناطیس دائم میباشد. این سرو درایور قادر است گشتاور، سرعت و موقعیت موتور دیسی مغناطیس دائم را کنترل نماید. سرو درایور AMD60 با شناسایی خودکار پارامترهای الکتریکی موتور حلقه کنترل گشتاور را به صوت خود تنظیم برقرار مینماید. همچنین این سرو درایور با تخمین سرعت موتور نیاز به انکودر و سایر سنسورهای سرعت را حذف کرده و به صورت سنسورلس سرعت موتور را کنترل میکند به گونهای که با تغییر بار متصل به شفت موتور سرعت آن ثابت خواهد ماند. همچنین در سرو درایور AMD60 قابلیت اتصال تاکو ژنراتور، انکودر افزایشی و انکودر مطلق نیز فراهم میباشد. در سرو درایور AMD60 میتوان با اتصال مقاومت ترمزی به خروجی تعبیه شده مانع از افزایش ولتاژ باس به هنگام شتاب منفی و آسیب رسیدن به سرو درایور، منبع تغذیه و سایر المانهای موجود در سیستم شد.
مشخصات اجمالی درایور موتور دیسی AMD60
- قابلیت جریان دهی تا ۳۲ آمپر به صورت دائم کار و ۶۴ آمپر به صورت لحظهای
- ولتاژ کاری ۱۵ الی ۷۲ ولت دی سی (قابلیت سفارشی سازی تا ۱۹۰ ولت)
- توان نامی ۷۶۸ وات
- دارای مد کنترل گشتاور، سرعت و موقعیت
- شناسایی اتوماتیک پارامترهای موتور دی سی (مقاومت و اندوکتانس سیم پیچ موتور)
- دارای مد کنترل گشتاور خود تنظیم (Auto-Tuning Torque Control)
- قابلیت کنترل سرعت موتور به صورت سنسورلس (بدون نیاز به انکودر یا تاکو ژنراتور)
- قابلیت کنترل از طریق ورودی آنالوگ، پالس PWM ،UART،USB و RS485
- قابلیت اتصال تاکوژنراتور دی سی
- قابلیت اتصال انکودر افزایشی و انکودر مطلق
- دارای خروجی فیدبک آنالوگ جریان و ولتاژ موتور
- قابلیت اتصال مقاومت ترمزی (Dynamic Braking)
- محافظت در برابر جریان کشی بیش حد
- محافظت در برابر اتصال کوتاه در خروجی موتور
- فرکانس کاری ۲۵ کیلوهرتز
- قابلیت تنظیم شتابگیری موتور (سافت استارت/استاپ)
- قابلیت نصب بر روی تابلو (Panel Mount)
- وزن درایور: ۱٫۲ کیلوگرم
- ابعاد: ۵۲×۱۱۴×۱۹۲ میلیمتر

ابعاد مکانیکی سرو درایور AMD60
راهنمای کاربری درایور AMD60
علائم راهنمای مطالعه این مطلب:
۱- مقدمه
سرو درایور AMD60 از سری درایورهای موتور دیسی مغناطیس دائم میباشد. این سرو درایور قادر است گشتاور، سرعت و موقعیت موتور دیسی مغناطیس دائم را کنترل نماید. سرو درایور AMD60 با شناسایی خودکار پارامترهای الکتریکی موتور حلقه کنترل گشتاور را به صوت خود تنظیم برقرار مینماید. همچنین این سرو درایور با تخمین سرعت موتور نیاز به انکودر و سایر سنسورهای سرعت را حذف کرده و به صورت سنسورلس سرعت موتور را کنترل میکند به گونهای که با تغییر بار متصل به شفت موتور سرعت آن ثابت خواهد ماند. همچنین در سرو درایور AMD60 قابلیت اتصال تاکو ژنراتور، انکودر افزایشی و انکودر مطلق نیز فراهم میباشد. در سرو درایور AMD60 میتوان با اتصال مقاومت ترمزی به خروجی تعبیه شده مانع از افزایش ولتاژ باس به هنگام شتاب منفی و آسیب رسیدن به سرو درایور، منبع تغذیه و سایر المانهای موجود در سیستم شد.
۲- مشخصات اجمالی درایور AMD60
- قابلیت جریان دهی تا ۳۲ آمپر به صورت دائم کار و ۶۴ آمپر به صورت لحظهای
- ولتاژ کاری ۱۵ الی ۷۲ ولت دی سی (قابلیت سفارشی سازی تا ۱۹۰ ولت)
- توان نامی ۷۶۸ وات
- دارای مد کنترل گشتاور، سرعت و موقعیت
- شناسایی اتوماتیک پارامترهای موتور دی سی (مقاومت و اندوکتانس سیم پیچ موتور)
- دارای مد کنترل گشتاور خود تنظیم (Auto-Tuning Torque Control)
- قابلیت کنترل سرعت موتور به صورت سنسورلس (بدون نیاز به انکودر یا تاکو ژنراتور)
- قابلیت کنترل از طریق ورودی آنالوگ، پالس PWM ،UART،USB و RS485
- قابلیت اتصال تاکوژنراتور دی سی
- قابلیت اتصال انکودر افزایشی و انکودر مطلق
- دارای خروجی فیدبک آنالوگ جریان و ولتاژ موتور
- قابلیت اتصال مقاومت ترمزی (Dynamic Braking)
- محافظت در برابر جریان کشی بیش حد
- محافظت در برابر اتصال کوتاه در خروجی موتور
- فرکانس کاری ۲۵ کیلوهرتز
- قابلیت تنظیم شتابگیری موتور (سافت استارت/استاپ)
- قابلیت نصب بر روی تابلو (Panel Mount)
- وزن درایور: ۱٫۲ کیلوگرم
- ابعاد: ۵۲×۱۱۴×۱۹۲ میلیمتر
۳- کاربردهای درایور AMD60
- اتوماسیون، CNC و رباتیک صنعتی
- سیستمهای ترکشن
- وسایل نقلیه الکتریکی (اسکوتر، دوچرخه برقی، موتور سیکلت برقی، رباتهای متحرک، خودروهای الکتریکی)
- نوار نقاله
- دستگاههای جوجه کشی، بافندگی و …
- صنایع چاپ و بستهبندی
- صنایع حک فلز و برش چوب
- تجهیزات آزمایشگاهی
- صنایع غذایی، نوشیدنی و دارویی
- صنایع و ماشین آلات دام و طیور
- کار با این سرو درایور بسیار ساده میباشد. اما برای جلوگیری از بروز اشتباه و آسیب به سرو درایور، حتما راهنمای کاربری را با دقت مطالعه فرمایید.
- هرگز بدون اتصال موتور، فرآیند شناسایی و کالیبراسیون را انجام ندهید.
- در تنظیم بهرههای مربوط به کنترلر گشتاور، سرعت و موقعیت دقت کافی را داشته باشید تا منجر به ناپایداری نشود.
- جهت اجتناب از برگشت توان و صدمه دیدن سرو درایور در صورتی که کاهش سرعت تند و یا تغییر جهت ناگهانی در سیستم دارید حتما از حرکت شتابدار استفاده کنید. در صورتی که امکان استفاده از حرکت شتابدار وجود ندارد حتما باید از مقاومت ترمزی مناسب در خروجی تعبیه شده سرو درایور استفاده کنید تا مانع از افزایش ولتاژ باس و آسیب سرو درایور به هنگام کاهش سرعت شدید و تغییر جهت ناگهانی شود.
- ولتاز نامی تغدیه ۲۴ ولت میباشد. هرگز پیک این ولتاژ از ۹۰ ولت تجاوز نکند.
- حتما از طریق همین صفحه و قسمت «فیلمهای آموزشی» توضیحات و نحوه انجام کار با این درایور را ببینید.
۴- مشخصات الکتریکی، کنترلی، دمایی و مکانیکی سرو درایور
۴ – ۱- جدول مشخصات الکتریکی درایور AMD60
جدول ۴-۱: مشخصات الکتریکی سرو درایور AMD60
|
پارامتر |
مقدار |
واحد |
| ولتاژ تغذیه |
۱۵ تا ۷۲ |
ولت |
| توان نامی |
۷۶۸ |
وات |
| حداکثر ولتاژ قابل تحمل خط تغذیه |
۹۰ |
ولت |
| حداقل ولتاژ قابل تحمل خط تغذیه |
۱۲ |
ولت |
| جریان دهی پیوسته |
۳۲ |
آمپر |
| جریان دهی لحظهای |
۶۴ |
آمپر |
| حداکثر توان تلفانی سرو درایور |
۸۷ |
وات |
| بازده سرو درایور |
۹۲ |
درصد |
| مقدار خازن موجود در مدار قدرت سرو درایور |
۳۰۰۰ |
میکرو فاراد |
| حداقل اندوکتانس قابل اتصال به خروجی سرو درایور |
۵۰ |
میکرو هانری |
| فرکانس سوئیچینگ |
۲۵ |
کیلو هرتز |
| حداکثر پهنای پالس (Duty Cycle) خروجی |
۹۵ |
درصد |
۴ -۲- جدول مشخصات کنترلی درایور موتور دی سی AMD60
جدول ۴-۲: مشخصات کنترلی سرو درایور AMD60
|
پارامتر |
مقدار |
واحد |
| ورودیهای فرمان | ولتاژ آنالوگ ۰ تا ۱۰ ولت، پالس PWM، UART، USB، RS485 |
_ |
| مدهای کنترلی | حلقه باز، کنترل ولتاژ، کنترل گشتاور، کنترل سرعت، کنترل موقعیت |
ـ |
| بارهای قابل اتصال | موتور دی سی مغناطیس دائم، کویل موتور، بار سلفی |
ـ |
| محافظتهای سخت افزاری | اضافه جریان، اتصال کوتاه در خروجی موتور، اضافه ولتاژ |
ـ |
| زمان نمونهبرداری حلقه کنترل ولتاژ | ۲۰۰ |
میکرو ثانیه |
| زمان نمونهبرداری حلقه کنترل جریان | ۲۰۰ |
میکرو ثانیه |
| زمان نمونهبرداری حلقه کنترل سرعت | ۲۰۰ |
میکرو ثانیه |
| زمان نمونهبرداری حلقه کنترل موقعیت | ۲۰۰ |
میکرو ثانیه |
۴ -۳- جدول مشخصات دمایی
جدول ۴-۳: مشخصات دمایی سرو درایور AMD60
| پارامتر | مقدار | واحد |
| دمای کاری | منفی ۲۰ تا مثبت ۸۵ | درجه سانتی گراد |
| نحوه خنک کاری | به صورت طبیعی | ـ |
۴ -۴- جدول مشخصات مکانیکی
جدول ۴-۴: مشخصات مکانیکی سرو درایور AMD60
| پارامتر | مقدار | واحد |
| وزن | ۱٫۲ | کیلوگرم |
| ابعاد | ۵۰x۱۱۴x۱۹۲ | میلیمتر |
| نحوه نصب | قابلیت نصب برروی تابلو برق | ـ |
۵- ورودی خروجیهای سرو درایور AMD60
در شکل ۵- ۱ ورودیها و خروجیهای سرو درایور AMD60 نمایش داده شدهاند. سرو درایور دارای ورودی تغذیه، خروجی موتور، خروجی بریک یا ترمز، ورودیها/خروجیهای کنترلی، ورودی انکودر، پورتهای USB، UART و RS485، پتانسیومترهای تنظیمی و دیپ سوئیچهای تنظیم مد میباشد.

شکل ۵-۱: ورودی خروجیهای سرو درایور AMD60
سرو درایور AMD60 از بخشهای زیر تشکیل شده است:

شکل ۵-۲: ورودی خروجیهای مقابل سرو درایور AMD60

شکل ۵-۳: ورودی خروجیهای جانبی سرو درایور AMD60
۱ ورودی تغذیه درایور
تغذیه سرو درایور AMD60 ولتاژ دی سی ۱۵ الی ۷۲ ولت میباشد. دقت شود که منبع تغذیه متناسب با بار مورد نیاز انتخاب گردد. به عنوان مثال در صورتی که از موتوری با جریان نامی ۱۵ آمپر استفاده مینمایید، حتما بایستی منبع تغذیه ۱۵ آمپری انتخاب نمایید (در صورت نیاز به شتاب گرفتن ناگهانی باید قابلیت جریاندهی منبع تغذیه حتی به چند برابر جریان نامی موتور افزایش یابد). به هنگام اتصال منبع تغذیه به پلاریته آن دقت نمایید (در صورت اشتباه زدن پلاریته درایور مجهز به حفاظت پلاریته معکوس نمیباشد).
۲ خروجی موتور سرو درایور AMD60
این قسمت خروجی سرو درایور میباشد که بایستی به موتور دیسی مغناطیس دائم متصل گردد. همچنین در سرو درایور AMD60 امکان اتصال بار سلفی و یا کویل موتور نیز به خروجی درایور میسر میباشد که در قسمت مربوطه توضیح داده خواهد شد.
۳ خروجی بریک یا مقاومت ترمزی سرو درایور
این قسمت خروجی بریک سرو درایور میباشد که بایستی به دو سر مقاومت ترمزی متصل گردد.
۴ ورودیها/خروجیهای کنترلی
این قسمت محل اتصال سیگنالهای فرمان همانند: فرمان ورودی آنالوگ ۰ تا ۱۰ ولت، ورودی پالس و جهت، ورودی فعال و غیرفعالساز، خروجی آنالوگ جریان موتور و خروجی آنالوگ ولتاژ ترمینال موتور میباشد. شکل ۵- ۴ ورودیها/خروجیهای سرو درایور را نشان میدهد. به طور کلی این بخش به دو قسمت ورودیهای ایزوله و ورودیها/خروجیهای غیرایزوله تقسیم میشود.

شکل ۵-۴: سیگنالهای کنترلی سرو درایور AMD60
در جدول ۵- ۱ و جدول ۵- ۲ به ترتیب عملکرد هر پایه و رنج قابل تحمل آن نمایش داده شده است.
جدول ۵- ۱: عملکرد پایههای ایزوله
|
پایه |
عملکرد |
رنج قابل تحمل |
| پایه +PUL و -PUL |
ورودیهای پالس |
۰ تا ۵ ولت |
| پایه +DIR و -DIR |
ورودیهای جهت |
۰ تا ۵ ولت |
| پایه +ENA و -ENA |
ورودیهای فعال و غیرفعال ساز |
۰ تا ۵ ولت |
جدول ۵- ۲: عملکرد پایههای غیرایزوله
|
پایه |
عملکرد |
رنج قابل تحمل |
| پایه +TACHO و -TACHO |
ورودیهای تاکوژنراتور |
۰ تا ۱۰۰ ولت |
| پایه GND |
زمین سرو درایور |
ـ |
| پایه Analog |
ورودی آنالوگ ۰ تا ۱۰ ولت |
۰ تا ۲۴ ولت |
| پایه 15V+ |
خروجی مثبت ۱۵ ولت |
ـ |
| پایه AO1 |
خروجی آنالوگ جریان موتور |
ـ |
| پایه AO2 |
خروجی آنالوگ ولتاژ موتور |
ـ |
۵ پتانسیومترهای تنظیمی
در این قسمت پتانسیومترهای تنظیمی قرار دارند. از این پتانسیومترها جهت تنظیم شتاب موتور و بهرههای کنترلی استفاده میشود.
۶ دیپ سوئیچهای تنظیمات سرو درایور
در این قسمت یک دیپ سوئیچ پیانوئی قرار دارد که از آن جهت تنظیم مدهای کنترلی، لیمیت جریان، شروع فرآیند شناسایی و ذخیرهکردن بهرههای کنترلی تنظیم شده بر روی حافظه طولانی مدت سرو درایور استفاده میشود.

شکل ۵-۵؛ دیپ سوئیچ تنظیمات سرو درایور
۷ چراغهای نشانگر وضعیت سرو درایور
در این قسمت دو عدد چراغ سبز رنگ قرار دارد که بیانگر وضعیت سرو درایور و خطاهای ایجاد شده میباشد.
۸ درگاه USB
سرو درایور ADM60 دارای یک عدد درگاه USB میباشد که از آن جهت اتصال به کامپیوتر به منظور کنترل سرو درایور از طریق نرم افزارهایی همچون متلب، ویژوال استودیو، لب ویو و … میتوان استفاده کرد. همچنین از درگاه USB جهت تنظیم پارامترهای سرو درایور و ارتباط با GUI استفاده میشود.
۹ و ۱۰ درگاههای RS485
سرو درایور ADM60 دارای ورودی و خروجی RS485 میباشد. از این درگاه جهت کنترل سرو درایور و تنظیم پارامترهای آن استفاده میشود. به کمک این درگاه میتوان چندین سرو درایور را به صورت زنجیرهای با یکدیگر کنترل کرد. شکل ۵- ۶ پین اوت سوکتهای RS485 را نمایش میدهد.

شکل ۵-۶: پین اوت سوکتهای RS485
۱۱ درگاه UART
سرو درایور ADM60 دارای یک عدد درگاه UART میباشد. از این درگاه جهت کنترل و تنظیم پارامترهای سرو درایور استفاده میشود. از این درگاه میتوان جهت کنترل سرو درایور از طریق کنترلرهای آردوینو و رزبری پای استفاده کرد.
۱۲ ورودی انکودرهای افزایشی و مطلق
این قسمت محل اتصال انکودرهای افزایشی و یا مطلق میباشد. در سرو درایور AMD60 امکان اتصال انکودر افزایشی و انکودر مطلق گری از نوع SSI فراهم میباشد. به کمک انکودر میتوان سرعت و یا موقعیت موتور دی سی مغناطیس دائم را به صورت دقیقی کنترل نمود. شکل ۵- ۷ پین اوت سوکت ورودی انکودرهای سرو درایور AMD60 را نشان میدهد.

شکل ۵-۷: سوکت ورودی انکودرهای سرو درایور
۶- مدهای کنترلی سرو درایور AMD60
سرو درایور AMD60 قادر است ولتاژ، گشتاور، سرعت و موقعیت موتور دیسی مغناطیس دائم را به صورت دقیقی کنترل نماید. در این بخش انواع مدهای کنترلی سرو درایور AMD60 توضیح داده شده است.
۶ -۱- مد حلقه باز
در مد حلقه باز سرو درایور AMD60 یک توان ثابتی را به موتور اعمال میکند که منجر به یک سرعت دورانی مشخصی میشود. این بدان معنی است که سرو درایور هیچ گونه کنترلی روی جریان، ولتاژ، سرعت و موقعیت موتور ندارد. به عنوان مثال در صورتی که میزان بار متصل به شفت موتور تغییر کند سرعت موتور نیز تغییر خواهد کرد. مزیت این روش سادگی راهاندازی آن میباشد به طوریکه برای تنظیم سرعت موتور تنها کافی است فرمان سرعت از طریق هر یک از ورودیهای آنالوگ، پالس و یا دیجیتال به سرو درایور اعمال شود.
۶ -۲- مدهای کنترلی حلقه بسته
سرو درایور AMD60 دارای مدهای کنترل ولتاژ، کنترل گشتاور، کنترل سرعت و کنترل موقعیت میباشد.
۶ -۲- ۱- مد کنترل ولتاژ
در مد کنترل ولتاژ سرو درایور AMD60 ولتاژ دو سر ترمینال موتور را کنترل میکند. این مد مناسب سیستمهای مبتنی بر باتری میباشد بطوریکه که با کاهش ولتاژ باتری به مرور زمان ولتاژ دو سر موتور ثابت خواهد ماند و موتور دچار افت سرعت نخواهد شد.
۶ -۲- ۲- مد کنترل گشتاور
در مد کنترل گشتاور سرو درایور با کنترل جریان موتور میتواند گشتاور اعمالی از سمت موتور به بار متصل به آن را کنترل نماید. به گونهای که با قرار گرفتن موتور زیر بار (اعمال بار خارجی به شفت موتور)، موتور گشتاوری بیش از مقدار تعیین شده را به بار اعمال نخواهد کرد.
۶ -۲- ۳- مد کنترل سرعت مبتنی بر سنسور (تاکو ژنراتور، انکودر افزایشی، انکودر مطلق)
در مد کنترل سرعت مبتنی بر سنسور سرو درایور AMD60 سرعت موتور را به صورتی دقیقی کنترل مینماید. در این مد به منظور کنترل دقیق سرعت بایستی از یکی از سنسورهای تاکو ژنراتور دیسی، انکودر افزایشی و یا انکودر مطلق به منظور سنجش و کنترل سرعت موتور توسط سرو درایور استفاده کرد. منظور از کنترل سرعت این است که با تغییر بار متصل به شفت موتور سرعت ثابت خواهد ماند.
۶ -۲- ۴- مد کنترل سرعت سنسورلس
در این مد سرو درایور قادر است بدون نیاز به سنسور سنجش سرعت (تاکو ژنراتور، انکودر)، سرعت موتور را کنترل نماید به گونهای که با تغییر بار متصل به شفت موتور سرعت آن ثابت خواهد ماند. در این مد سرو درایور با تخمین ولتاژ BEMF سرعت موتور را کنترل میکند.
۶ -۲- ۵- مد کنترل موقعیت
در مد کنترل موقعیت سرو درایور قادر است با استفاده از انکودر افزایشی و یا مطلق، موقعیت موتور دیسی مغناطیس دائم را به طور دقیقی کنترل نماید.
۷- منابع فرمان در سرو درایور AMD60
سرو درایور AMD60 دارای منابع فرمان آنالوگ، پالس/جهت، UART، USB، RS485 و … میباشد. در ادامه به توضیح هریک از این منابع فرمان می پردازیم.
۷ -۱- دیپ سوئیچهای پیانوئی
سرو درایور AMD60 دارای یک دیپ سوئیچ پیانوئی ۶ تایی میباشد که از آن به منظور اهداف زیر استفاده میشود.
- انتخاب مد حلقه باز یا مد حلقه بسته
- تنظیم لیمیت جریان
- انتخاب تنظیم ضرایب به صورت دستی و ذخیره کردن آنها روی حافظه طولانی مدت سرو درایور
- انتخاب مدهای کنترلی حلقه بسته
- شروع فرآیند شناسایی پارامترهای موتور
۷ -۱- ۱- انتخاب مد حلقه باز یا مد حلقه بسته
با استفاده از دیپ سوئیچ شماره ۱ میتوان تعیین کرد که سرو درایور به صورت حلقه باز یا حلقه بسته عمل نماید. مطابق شکل ۷ -۱ چنانچه دیپ سوئیچ شماره ۱ در حالت OFF قرار داشته باشد سرو درایور در مد حلقه باز عمل خواهد کرد و چنانچه در حالت ON باشد سرو درایور در یکی از مدهای حلقه بسته عمل مینماید.

شکل ۷ -۱: انتخاب مد حلقه باز یا حلقه بسته
۷ -۱- ۲- انتخاب تنظیم ضرایب به صورت دستی و ذخیره کردن آنها روی حافظه طولانی مدت سرو درایور
تمامی پارامترهای سرو درایور از طریق پروتکلهای USB، UART و RS485 قابل تنظیم میباشند. اما پارامترهای پرکاربردی همچون شتاب موتور(سافت استارت/سافت استاپ)، لیمیت جریان و ضرایب کنترلرهای PI نیز به صورت دستی قابل تنظیم میباشند.
برای تنظیم پارامترهای ذکر شده چنانچه مطابق شکل ۷- ۲ دیپ سوئیچ شماره ۶ در حالت ON قرار گیرد میتوان پارامترها را به صورت دستی تنظیم کرد. با قرار دادن مجدد دیپ سوئیچ شماره ۶ در حالت OFF پارامترها بر روی حافظه طولانی مدت سرو درایور ذخیره میشوند.

شکل ۷-۲: انتخاب تنظیم ضرایب به صورت دستی و ذخیره کردن آنها رو حافظه طولانی مدت سرو درایور
۷ -۱- ۳- تنظیم لیمیت جریان در مد حلقه باز
چنانچه مطابق شکل ۷- ۱ سرو درایور را در مد حلقه باز قرار دهیم آنگاه توسط دیپ سوئیچهای شماره ۲، ۳، ۴ و ۵ میتوان لیمیت جریان را تنظیم نمود. برای این منظور باید مطابق شکل ۷- ۲ دیپ سوئیچ شماره ۶ را در حالت ON قرار دهیم تا حالت تنظیم دستی فعال گردد. سپس مطابق شکل ۷- ۳ توسط دیپ سوئیچهای شماره ۲، ۳، ۴ و ۵ میتوان لیمیت جریان را تنظیم نمود.

شکل ۷ -۳: تنظیم لیمیت جریان در مد حلقه باز به صورت دستی
پس از تنظیم لیمیت جریان در مد حلقه باز بایستی دیپ سوئیچ شماره ۶ را در حالت OFF قرار داده تا مقادیر تنظیم شده بر روی حافظه طولانی مدت سرو درایور ذخیره گردند.
۷ -۱- ۴- شروع فرآیند شناسایی پارامترهای موتور
سرو درایور AMD60 قادر است با شناسایی پارامترهای الکتریکی موتور شامل مقاومت و اندوکتانس سیم پیچ روتور، مد کنترل گشتاور را به صورت کاملا خودکار تنظیم نماید به صورتی که کاربر نیازی به تنظیم ضرایب کنترلر گشتاور نخواهد داشت. همچنین سرو درایور با تخمین ولتاژ BEMF میتواند بدون نیاز به استفاده از تاکو ژنراتور یا انکودر، سرعت موتور را تحت شرایط تغییر بار ثابت نگه دارد.
به منظور استفاده از این قابلیتها بایستی مطابق شکل ۷- ۱ دیپ سوئیچ شماره ۱ را در حالت ON قرار دهیم. با قرار گرفتن دیپ سوئیچ شماره ۱ در حالت ON دو عملیات رخ میدهد: اولا سرو درایور وارد مد کنترلی حلقه بسته شده و ثانیا سرو درایور به مدت ۵ ثانیه شروع به شناسایی مقاومت و اندوکتانس سیم پیچ روتور مینماید.
همچنین مطابق شکل ۷- ۴ چنانچه دیپ سوئیچ شماره ۱ را مجدد در حالت OFF قرار داده و سپس در حالت ON قرار دهیم فرآیند شناسایی یک مرحله دیگر تکرار خواهد شد.

شکل ۷ -۴: شروع فرآیند شناسایی و مراحل لازم جهت تکرار آن
۷ -۱- ۵- انتخاب مدهای کنترلی حلقه بسته
سرو درایور AMD60 در حالت حلقه بسته دارای مدهای کنترل ولتاژ، کنترل گشتاور، کنترل سرعت و کنترل موقعیت میباشد. چنانچه مطابق شکل ۷- ۱ دیپ سوئیچ شماره ۱ را در حالت ON قرار دهیم ابتدا به مدت ۵ ثانیه سرو درایور شروع به شناسایی مقاومت و اندوکتانس سیم پیچ روتور میکند. پس از اتمام شناسایی مطابق شکل ۷- ۵ با استفاده از دیپ سوئیچهای شماره ۲، ۳، ۴ و ۵ میتوان مد کنترلی حلقه بسته مورد نظر را انتخاب نمود.

شکل ۷-۵: مدهای کنترلی حلقه بسته سرو درایور AMD60
۷ -۲- پتانسیومترهای تنظیمی
مطابق شکل ۵- ۱ سرو درایور دارای ۳ عدد پتانسیومتر تریمری میباشد. از این پتانسیومترها جهت تنظیم شتاب موتور(سافت استارت/استاپ) و ضرایب کنترلرهای PI استفاده میشود. شکل ۷- ۶ محل قرارگیری این پتانسیومترها و جهت چرخش به منظور افزایش پارامتر مورد نظر را نشان میدهد.

شکل ۷-۶: پتانسیومترهای تنظیمی و جهت چرخش آنها به منظور افزایش مقدار پارامتر
۷ -۳- ورودیهای پالس، جهت و فعالساز
همانطور که در شکل ۵- ۴ مشاهده میکنید سرو درایور دارای ۳ عدد ورودی ایزوله اپتوکوپلری پالس، جهت و فعالساز میباشد. به کمک این ورودیها میتوان گشتاور، سرعت و موقعیت موتور دی سی مغناطیس دائم را با اعمال پالس کنترل کرد. مدار ایزوله اپتوکوپلری این سه ورودی در شکل ۷-۷ نمایش داده شده است.

شکل ۷-۷: مدار ایزوله اپتوکوپلری ورودیهای پالس، جهت و فعالساز
۷ -۴- ورودی آنالوگ
به کمک ورودی آنالوگ میتوان گشتاور، سرعت و موقعیت موتور دیسی مغناطیس دائم را از طریق ولتاژ آنالوگ ۰ تا ۱۰ ولت کنترل کرد. همچنین امکان اتصال ولوم یا پتانسومتر خارجی به سرو درایور از طریق ورودی آنالوگ میسر میباشد.
۷ -۵- خروجیهای آنالوگ
مطابق شکل ۵-۱ سرو درایور دارای دو خروجی آنالوگ AO1 و AO2 میباشد. این خروجیهای آنالوگ یک ولتاژ ۰ تا ۱۰ ولت متناسب با جریان و ولتاژ موتور تولید میکنند. خروجی AO1 مربوط به جریان موتور و خروجی AO2 مربوط به ولتاژ موتور میباشد.
۷ -۶- منابع فرمان UART، USB و RS485
از طریق پروتکلهای UART، USB و RS485 میتوان گشتاور، سرعت و موقعیت موتور دیسی مغناطیس دائم را کنترل کرد. همچنین برای تنظیم پارامترهای درایور از این منابع فرمان استفاده میشود. جزئیات این منابع فرمان در بخش کنترل دیجیتال سرو درایور آورده شده است.
۸- اتصال سرو درایور به مدارهای فرمان خارجی
در این بخش انواع حالتهای اتصال سرو درایور به مدارهای فرمان خارجی از جمله: PLC با خروجی NPN، PNP و آنالوگ، آردوئینو و بردهای میکروکنترلری، پتانسیومتر خارجی، اتصال تاکو ژنراتور به سرو درایور، اتصال انکودر افزایشی و مطلق به سرو درایور آورده شده است.
۸ -۱- راه اندازی سرو درایور با پتانسیومتر یا ولوم خارجی
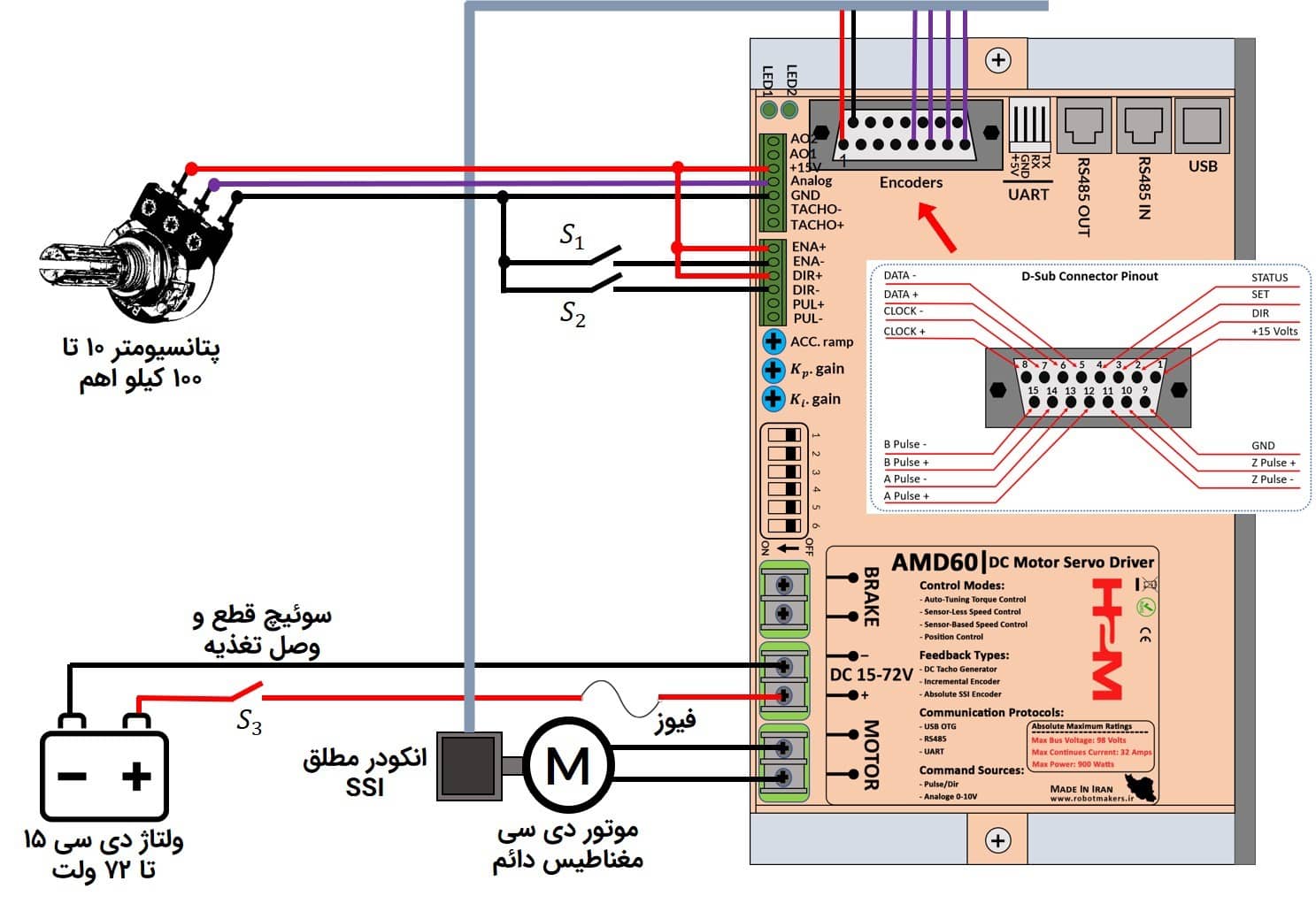
در شکل ۸- ۱ مدار راهاندازی سرو درایور از طریق پتانسیومتر خارجی نمایش داده شده است.

شکل ۸-۱: : راه اندازی سرو درایور با پتانسیومتر یا ولوم خارجی
همانطور که مشاهده میکنید سرو درایور در حالت حلقه باز قرار داشته و لیمیت جریان روی ۳۲ آمپر میباشد. دیپ سوئیچ شماره۶ در حالت OFF میباشد که برای اینکه بتوانید لیمیت جریان و شتاب موتور را تنظیم نمایید باید دیپ سوئیچ شماره ۶ را در حالت ON قرار داده و پس از تنظیم لیمیت جریان و شتاب موتور مجدد به حالت OFF برگردانید.
در سیم کشی به نکات زیر توجه کنید:
- رنج ولتاژ تغذیه ۱۵ تا ۷۲ ولت دیسی میباشد. در صورتی که از ترانس و پل دیود برای تامین تغذیه سرو درایور استفاده میکنید به اندازه کافی در خروجی پل دیود خازن الکترولیت قرار دهید. پیک ولتاژ نباید بیشتر از ۹۰ ولت باشد.
- سرو درایور جهت راهاندازی موتور دی سی مغناطیس دائم، کویل موتور و بار سلفی طراحی شده است. چانچه قصد اتصال موتور دی سی شانت یا سری را دارید حتما جهت مشاوره برای راه اندازی با شرکت تماس بگیرید.
- متناسب با لیمیت جریان تنظیم شده یک عدد فیوز سر راه تغذیه سرو درایور قرار دهید. به عنوان مثال چنانچه لیمیت جریان را روی ۸ آمپر گذاشته اید میتوانید از یک فیوز ۱۰ آمپر استفاده کنید.
- سوئیچ قطع و وصل تغذیه باید بتواند ولتاژ و جریان مورد نظر را تحمل نماید. ولی سوئیچهای فعالساز و تغییر جهت از نوع سیگنال میباشند و در حد چند میلی آمپر را بتوانند تحمل کنند کفایت مینماید.
- پتانسیومتر مورد استفاده میتواند در رنج ۱۰ تا ۱۰۰ کیلو اهم باشد. ولی مقدار پیشنهادی شرکت ۵۰ کیلواهم میباشد.
۸ -۲- راهاندازی سرو درایور با پی ال اسی (PLC)
مطابق شکل ۸ -۲ برای راهاندازی سرو درایور از PLC با خروجی آنالوگ ۰ تا ۱۰ ولت و خروجی NPN استفاده شده است.

شکل ۸-۲: راهاندازی سرو درایور با ولتاژ آنالوگ ۰ تا ۱۰ ولت PLC و خروجی NPN
مطابق شکل ۸ -۳ برای راهاندازی سرو درایور از PLC با خروجی آنالوگ ۰ تا ۱۰ ولت و خروجی PNP استفاده شده است.
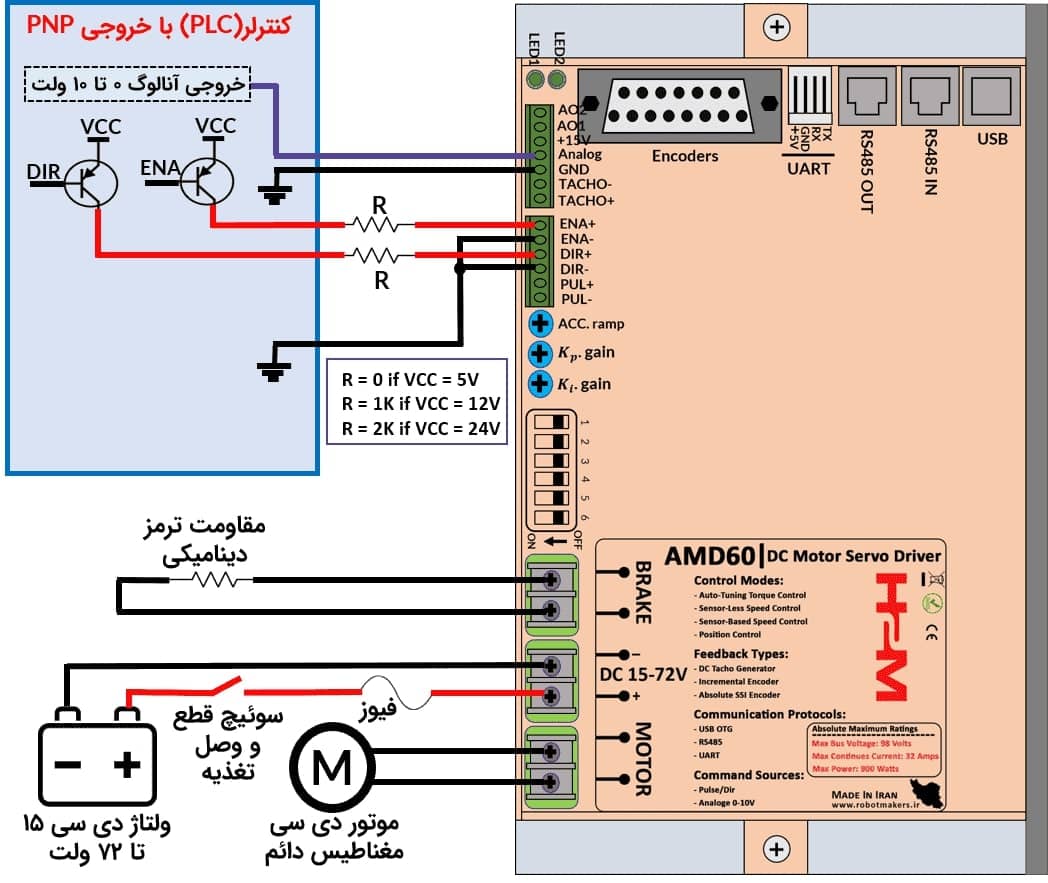
شکل ۸-۳: راه اندازی سرو درایور با ولتاژ آنالوگ ۰ تا ۱۰ ولت PLC و خروجی PNP Run_PLC_Analog_PNP-min
مطابق شکل ۸ -۴ برای راهاندازی سرو درایور از PLC با خروجی NPN استفاده شده است. توجه نمایید که فرکانس پالس PWM اعمالی باید بین ۱ تا ۵ کیلوهرتز در نظر گرفته شود.

شکل ۸-۴: راه اندازی سرو درایور با پالس PWM با خروجی NPN
مطابق شکل ۸ -۵ برای راهاندازی سرو درایور از PLC با خروجی PNP استفاده شده است. توجه نمایید که فرکانس پالس PWM اعمالی باید بین ۱ تا ۵ کیلوهرتز در نظر گرفته شود.

شکل ۸-۵: راه اندازی سرو درایور با پالس PWM با خروجی PNP
۸ -۳- راهاندازی سرو درایور با آردوئینو و سایر بردهای میکروکنترلری

شکل ۸-۶: راه اندازی سرو درایور با آردوئینو یا سایر بردهای میکروکنترلری
۸-۴- ارتباط با سرو درایور از طریق پروتکلهای UART، USB و RS485
در سرو درایور AMD60 در حالت کنترل دیجیتال میتوان از طریق پروتکلهای UART، USB و RS485 گشتاور، سرعت و موقعیت موتور را کنترل کرد. همچنین از این پروتکلها جهت تنظیم پارامترهای سرو درایور و دریافت مقدار ولتاژ باس، ولتاژ و جریان موتور و … استفاده میشود.
۸ -۴- ۱- ارتباط با سرو درایور از طریق پروتکل UART
در شکل ۸ -۷ نحوه اتصال سرو درایور به آردوئینو و سایر بردهای میکروکنترلری با منطق ۳٫۳ ولت یا ۵ ولت از طریق پروتکل UART نمایش داده شده است.

شکل ۸-۷: ارتباط با سرو درایور از طریق پروتکل UART
جدول ۸ -۱ تنظیمات مربوط به پروتکل UART را نشان داده است. توجه نمایید که نرخ ارسال پیش فرض اطلات یا همان Baud Rate در سرو درایور مقدار ۵۷۶۰۰ بیت در ثانیه میباشد.
جدول ۸ -۱: تنظیمات پروتکل UART و RS485
|
Parameter |
Value |
| Baud Rate (bit per second) | 1200, 2400, 4800, 9600, 14400, 19200, 38400, 56000, 57600, 115200 |
| Data bits | 8 |
| Parity | None |
| Stop bits | 1 |
۸ -۴- ۲- ارتباط با سرو درایور از طریق پروتکل RS485
سرو درایور AMD60 را میتوان از طریق پروتکل RS485 در شبکهای از دستگاههای مختلف که از طریق RS485 با یکدیگر به صورت زنجیرهوار وصل شدهاند کنترل کرد. در پروتکل RS485 فریمهای دیجیتال از طریق دو رشته سیم به صورت تفاضلی منتقل میشوند. مطابق شکل ۸-۸ سوکتهای RS485 دارای پینهای A و B و دو عدد پین GND میباشند. پینهای تفاضلی همان A و B بوده و تنها کافیست همین دو پین به باس متصل شوند.
در شکل ۸-۸ ساختار باس در ارتباط RS485 نمایش داده شده است.

شکل ۸-۸: ساختار باس در پروتکل RS485
مطابق شکل ۸-۸ دو عدد سرو درایور، کنترلر و برد سنسور همگی به باس RS485 وصل شدهاند. از آنجایی که جفت سوکتهای RS485 در سرو درایور دقیقا مشابه هم هستند تفاوتی نمیکند که کدام یک از این سوکتها به باس متصل شوند. به هنگام ایجاد باس RS485 به نکات زیر دقت کنید:
- در استاندارد RS485 دوسیمه تنها یک دستگاه در لحظه میتواند دیتا ارسال کند و بقیه باید در حالت دریافت دیتا قرار گیرند.
- حتما باید از مقاومت ترمینیشن یا همان در ابتدا و انتهای خط استفاده کرد تا مانع از انعکاس دیتاها به هنگام رسیدن به انتهای خط شد. مقدار این مقاومت باید برابر با امپدانس کابل استفاده شده باشد. معمولا مقدار ۱۲۰ اهم عدد مناسبی است.
- در صورتی که از دو رشته سیم جدا برای برقراری باس و اتصال دستگاهها به هم استفاده میکنید حتما دو رشته سیم را دور یکدیگر بپیچانید. این امر باعث کاهش مساحت موثر بین دو رشته سیم شده و باعث کاهش نویز پذیری باس خواهد شد.
- دلیل استفاده از دو عدد سوکت برای RS485 این است که بتوان آنها را به صورت زنجیرهوار به یکدیگر وصل کرد.
- تنظیمات مربوط به پروتکل RS485 مطابق جدول ۸-۱ شبیه تنظیمات UART میباشد. استاندارد RS485 تنها یک بستر سخت افزاری جهت ارسال دادهها در محیطهای صنعتی و پرنویز ایجاد کرده است. نرخ ارسال دیتاها به صورت پیش فرض ۵۷۶۰۰ بیت در ثانیه میباشد.
۸ -۴- ۳- ارتباط با سرو درایور از طریق پروتکل USB
سرو درایور دارای یک عدد درگاه USB میباشد که توسط آن میتوان از طریق کامپیوتر و به وسیله نرمافزارهایی همچون متلب، ویژوال استودیو، لب ویو و … سرو درایور را کنترل کرد. کار با این پروتکل بسیار ساده میباشد. برای مشاهده نمونه کد متلب، ويژوال استودیو، لب ویو و … به مقالات آموزشی بلاگ ربات سازان مراجعه کنید.
۹- کنترل دیجیتال از طریق UART، USB و RS485
در سرو درایور AMD60 میتوان به کمک فریمهای دیجیتال گشتاور، سرعت و موقعیت موتور دی سی مغناطیس دائم را از طریق پروتکلهای UART، USB و RS485 کنترل کرد. همچنین در مواقع نیاز جریان، ولتاژ، سرعت و سایر پارامترها را از سرو درایور دریافت نمود
۹ -۱- فریم های ارسالی، تصدیق و فیدبک
در این قسمت ساختار فریمهای ارسالی، تصدیق و فیدبک توضیح داده شده است.
۹ -۱- ۱- ساختار فریم ارسالی
ساختار فریم ارسالی در پروتکلهای UART، USB و RS485 مشابه هم هستند. در شکل ۱-۹ ساختار فریم ارسالی نمایش داده شده است. همانطورکه مشاهده میکنید فریم متشکل از ۱۰ بایت است. در ادامه به توضیح هر قسمت از فریم میپردازیم.

شکل ۹-۱: ساختار فریم ارسالی
بایتهای شروع فریم (Start Bytes)
بایتهای شروع فریم(Start Bytes) متشکل از ۲ بایت هستند. مقدار هر بایت برحسب هگزادسمیال 0xFF و برحسب دسیمال ۲۵۵ است. این دو بایت در ابتدای فریم قرار میگیرند و همواره مقدارشان ثابت است.
بایت آدرس سرو درایور (Address)
آدرس سرو درایور شامل یک بایت است که میتواند مقداری بین ۰ تا ۲۵۴ تنظیم شود.
بایت فرمان (Command)
این بایت فرمان عملیاتی که باید سرو درایور به آن عمل نماید میباشد. این فرمان میتواند فرمان تنظیم گشتاور، سرعت، موقعیت و … باشد و یا فرمان درخواست ارسال ولتاژ باس، ولتاژ موتور، جریان موتور و … را صادر نماید. در جدول ۹-۱ تمامی فرمانهای سرو درایور آورده شده است.
جدول ۹-۱: جدول دستورات سرو درایور
|
فرمان |
عملیات |
مقدار پیش فرض |
|
0x01 |
تنظیم ولتاژ ترمینال موتور (ولتاژ خروجی سرو درایور) |
۰ |
|
0x02 |
تنظیم جریان موتور بر حسب آمپر از ۰ تا ۳۲ آمپر |
۰ |
|
0x03 |
تنظیم سرعت موتور بر حسب دور بر دقیقه (RPM) |
۰ |
|
0x04 |
تنظیم موقعیت موتور بر حسب درجه |
۰ |
|
0x05 |
Reserved |
— |
|
0x06 |
Reserved |
— |
|
0x07 |
Reserved |
— |
|
0x08 |
تنظیم نحوه عملکرد سرو درایور هنگام اعمال ورودی فعال ساز |
۰ |
|
0x09 |
تنظیم ضریب کالیبراسیون تاکو ژنراتور دی سی |
۸ |
|
0x0A |
تنظیم حداکثر ولتاژ تغذیه بر حسب ولت |
۲۴ ولت |
|
0x0B |
تنظیم لیمیت کنترلر جریان بر حسب آمپر |
۱۵ آمپر |
|
0x0C |
تنظیم لیمیت کنترلر سرعت بر حسب ولت |
۲۴ ولت |
|
0x0D |
تنظیم لیمیت کنترلر سرعت بر حسب دور بر دقیقه |
۵۰۰۰ دور بر دقیقه |
|
0x0E |
تنظیم شتاب مثبت در حالت حلقه باز |
۱۰ |
|
0x0F |
تنظیم شتاب منفی در حالت حلقه باز |
۱۰ |
|
0x10 |
تنظیم شتاب مثبت در حالت حلقه بسته |
۱۰ |
|
0x11 |
تنظیم شتاب منفی در حالت حلقه بسته |
۱۰ |
|
0x12 |
تنظیم ضریب تناسبی (Kp) کنترلر ولتاژ |
۵۰ |
|
0x13 |
تنظیم ضریب انتگرالگیر (Ki) کنترلر ولتاژ |
۲۵۰ |
|
0x14 |
تنظیم ضریب تناسبی (Kp) کنترلر جریان دستی |
۱۰ |
|
0x15 |
تنظیم ضریب انتگرالگیر (Ki) کنترلر جریان دستی |
۵۰ |
|
0x16 |
تنظیم ضریب تناسبی (Kp) کنترلر سرعت مبتنی بر تاکو ژنراتور |
۲۰ |
|
0x17 |
تنظیم ضریب انتگرالگیر (Ki) کنترلر سرعت مبتنی بر تاکو ژنراتور |
۱ |
|
0x18 |
تنظیم ضریب تناسبی (Kp) کنترلر سرعت مبتنی بر انکودر افزایشی |
۱ |
|
0x19 |
تنظیم ضریب انتگرالگیر (Ki) کنترلر سرعت مبتنی بر انکودر افزایشی |
۵ |
|
0x1A |
تنظیم ضریب تناسبی (Kp) کنترلر سرعت مبتنی بر انکودر مطلق |
۱ |
|
0x1B |
تنظیم ضریب انتگرالگیر (Ki) کنترلر سرعت مبتنی بر انکودر مطلق |
۵ |
|
0x1C |
تنظیم ضریب تناسبی (Kp) کنترلر سرعت سنسورلس |
۱۰ |
|
0x1D |
تنظیم ضریب انتگرالگیر (Ki) کنترلر سرعت سنسورلس |
۵۰ |
|
0x1E |
تنظیم ضریب تناسبی (Kp) کنترلر موقعیت مبتنی بر انکودر افزایشی |
۰٫۱ |
|
0x1F |
تنظیم ضریب انتگرالگیر (Ki) کنترلر موقعیت مبتنی بر انکودر افزایشی |
۰٫۵ |
|
0x20 |
Reserved |
— |
|
0x21 |
تنظیم ضریب تناسبی (Kp) کنترلر موقعیت مبتنی بر انکودر مطلق |
۰٫۱ |
|
0x22 |
تنظیم ضریب انتگرالگیر (Ki) کنترلر موقعیت مبتنی بر انکودر مطلق |
۰٫۵ |
|
0x23 |
Reserved |
— |
|
0x24 |
تنظیم تعداد پالس بر دور انکودر افزایشی |
۲۵۰۰ پالس |
|
0x25 |
تنظیم پالس بر دور انکودر مطلق (Single Resolution) |
۸۱۹۲ پالس |
|
0x26 |
تنظیم تعداد دور انکودر مطلق (Multi Resolution) |
۴۰۹۶ دور |
|
0x27 |
تنظیم مقاومت سیم پیچ موتور بر حسب اهم |
صفر اهم |
|
0x28 |
تنظیم اندوکتانس سیم پیچ موتور بر حسب میکروهانری |
صفر میکرو هانری |
|
0x29 |
تنظیم آدرس سرو درایور |
۰ |
|
0x2A |
تنظیم نرخ ارسال و دریافت داده در مد UART (تنها در مد USB معتبر می باشد) |
۵۷۶۰۰ بیت در ثانیه |
|
0x2B |
تنظیم نرخ ارسال و دریافت داده در مد RS485 (تنها در مد USB معتبر می باشد) |
۵۷۶۰۰ بیت در ثانیه |
|
0x2C |
غیر فعال کردن ورودی آنالوگ در شرایط نویزی |
۰ |
|
0x2D |
غیر فعال کردن ورودی پالس در شرایط نویزی |
۰ |
|
0x2E |
Reserved |
— |
|
0x2F |
Reserved |
— |
|
0x30 |
فرمان ارسال ولتاژ خط تغذیه (ولتاژ باس) |
— |
|
0x31 |
فرمان ارسال ولتاژ ترمینال موتور (ولتاژ خروجی موتور سرو درایور) |
— |
|
0x32 |
فرمان ارسال جریان سیم پیچ موتور بر حسب آمپر |
— |
|
0x33 |
فرمان ارسال تعداد پالس انکودر افزایشی (کل پالسهای پیمایش شده) |
— |
|
0x34 |
فرمان ارسال تعداد پالس انکودر مطلق (کل پالسهای پیمایش شده) |
— |
|
0x35 |
فرمان ارسال سرعت موتور بر حسب دور بر دقیقه |
— |
|
0x36 |
فرمان ارسال موقعیت موتور بر حسب درجه |
— |
|
0x37 |
Reserved |
— |
|
0x38 |
Reserved |
— |
|
0x39 |
Reserved |
— |
|
0x3A |
Reserved |
— |
|
0x3B |
Reserved |
— |
|
0x3C |
Reserved |
— |
|
0x3D |
Reserved |
— |
|
0x3E |
فرمان ارسال نحوه عملکرد سرو درایور هنگام اعمال ورودی فعال ساز |
۰ |
|
0x3F |
فرمان ارسال ضریب کالیبراسیون تاکو ژنراتور |
۸ |
|
0x40 |
فرمان ارسال حداکثر ولتاژ تغذیه بر حسب ولت |
۲۴ ولت |
|
0x41 |
فرمان ارسال لیمیت کنترلر جریان بر حسب آمپر |
۱۵ آمپر |
|
0x42 |
فرمان ارسال لیمیت کنترلر سرعت بر حسب ولت |
۲۴ ولت |
|
0x43 |
فرمان ارسال لیمیت کنترلر سرعت بر حسب دور بر دقیقه |
۵۰۰۰ دور بر دقیقه |
|
0x44 |
فرمان ارسال شتاب مثبت در حالت حلقه باز |
۰٫۱ |
|
0x45 |
فرمان ارسال شتاب منفی در حالت حلقه باز |
۰٫۱ |
|
0x46 |
فرمان ارسال شتاب مثبت در حالت حلقه بسته |
۰٫۱ |
|
0x47 |
فرمان ارسال شتاب منفی در حالت حلقه بسته |
۰٫۱ |
|
0x48 |
فرمان ارسال ضریب تناسبی (Kp) کنترلر ولتاژ |
۱۰ |
|
0x49 |
فرمان ارسال ضریب انتگرالگیر (Ki) کنترلر ولتاژ |
۵۰ |
|
0x4A |
فرمان ارسال ضریب تناسبی (Kp) کنترلر جریان دستی |
۱۰ |
|
0x4B |
فرمان ارسال ضریب انتگرالگیر (Ki) کنترلر جریان دستی |
۵۰ |
|
0x4C |
فرمان ارسال ضریب تناسبی (Kp) کنترلر سرعت مبتنی بر تاکو ژنراتور |
۱۰ |
|
0x4D |
فرمان ارسال ضریب انتگرالگیر (Ki) کنترلر سرعت مبتنی بر تاکو ژنراتور |
۵۰ |
|
0x4E |
فرمان ارسالضریب تناسبی (Kp) کنترلر سرعت مبتنی بر انکودر افزایشی |
۱۰ |
|
0x4F |
فرمان ارسالضریب انتگرالگیر (Ki)کنترلر سرعت مبتنیبر انکودر افزایشی |
۵۰ |
|
0x50 |
فرمان ارسال ضریب تناسبی (Kp) کنترلر سرعت مبتنی بر انکودر مطلق |
۱۰ |
|
0x51 |
فرمان ارسال ضریب انتگرالگیر (Ki) کنترلر سرعت مبتنی بر انکودر مطلق |
۵۰ |
|
0x52 |
فرمان ارسال ضریب تناسبی (Kp) کنترلر سرعت سنسورلس |
۱۰ |
|
0x53 |
فرمان ارسال ضریب انتگرالگیر (Ki) کنترلر سرعت سنسورلس |
۵۰ |
|
0x54 |
فرمانارسالضریبتناسبی (Kp) کنترلر موقعیت مبتنیبر انکودر افزایشی |
۱ |
|
0x55 |
فرمانارسالضریبانتگرالگیر (Ki)کنترلرموقعیت مبتنیبر انکودر افزایشی |
۵ |
|
0x56 |
Reserved |
— |
|
0x57 |
فرمان ارسال ضریب تناسبی (Kp) کنترلر موقعیت مبتنی بر انکودر مطلق |
— |
|
0x58 |
فرمانارسالضریب انتگرالگیر (Ki) کنترلر موقعیت مبتنیبر انکودر مطلق |
— |
|
0x59 |
Reserved |
— |
|
0x5A |
فرمان ارسال تعداد پالس بر دور انکودر افزایشی |
۲۵۰۰ پالس |
|
0x5B |
فرمان ارسال پالس بر دور انکودر مطلق (Single Resolution) |
۸۱۹۲ پالس |
|
0x5C |
فرمان ارسال تعداد دور انکودر مطلق (Multi Resolution) |
۴۰۹۶ دور |
|
0x5D |
فرمان ارسال مقاومت سیم پیچ موتور بر حسب اهم |
صفر اهم |
|
0x5E |
فرمان ارسال اندوکتانس سیم پیچ موتور بر حسب میکروهانری |
صفر میکرو هانری |
|
0x5F |
فرمان ارسال نرخ ارسال و دریافت داده در مد UART (تنها در مد USB معتبر می باشد) |
۵۷۶۰۰ بیت در ثانیه |
|
0x60 |
فرمان ارسال نرخ ارسال و دریافت داده در مد RS485 (تنها در مد USB معتبر می باشد) |
۵۷۶۰۰ بیت در ثانیه |
|
0x61 |
فرمان ارسال مقدار متغیر غیرفعال کردن ورودی آنالوگ در شرایط نویزی |
۰ |
|
0x62 |
فرمان ارسال مقدار متغیر غیرفعال کردن ورودی پالس در شرایط نویزی |
۰ |
|
… |
Reserved |
— |
|
0xF2 |
تنظیم آستانه ولتاژ فعال شدن ورودی آنالوگ |
۰٫۵ ولت |
|
0xF3 |
فرمان ارسال مقدار آستانه ولتاژ فعال شدن ورودی آنالوگ |
۰٫۵ ولت |
|
0xF4 |
تنظیم آفست سنسور ولتاژ |
۰ |
|
0xF5 |
فرمان ارسال مقدار آفست سنسور ولتاژ |
۰ |
|
0xF6 |
تنظیم آفست سنسور جریان |
۲۱۲۸۰ |
|
0xF7 |
فرمان ارسال مقدار آفست سنسور جریان |
۲۱۲۸۰ |
|
0xF8 |
تنظیم آفست تاکوژنراتور دی سی |
۵۸۲۰ |
|
0xF9 |
فرمان ارسال مقدار آفست تاکو ژنراتور دی سی |
۵۸۲۰ |
|
0xFA |
توفق اضطراری موتور (Force/Emergency Stop) |
— |
|
0xFB |
شروع شناسایی پارامترهای الکتریکی سیم پیچ موتور |
— |
|
0xFC |
فرمان ارسال خطاهای ایجاد شده در سرو درایور |
— |
بایتهای داده (Data)
بایتهای داده که شامل ۴ بایت است دیتاهای ارسالی یا دریافتی از سرو درایور میباشند. دادهها باید براساس استاندارد IEEE754 منتقل شوند. به عنوان مثال چنانچه هدف تنظیم سرعت موتور برحسب RPM باشد، ابتدا باید عدد سرعت به صورت استاندارد IEEE754 تبدیل شود و سپس مقدار حاصل شده در این ۴ بایت قرار گیرد.
بایت پایان فریم (Stop Byte)
بایت پایان فریم (Stop Byte) شامل یک بایت میباشد. مقدار این بایت برحسب هگزادسمیال 0xFE و برحسب دسیمال ۲۵۴ میباشد. این بایت در انتهای فریم و قبل از بایت CRC قرار میگیرد و همواره مقدار آن ثابت میباشد.
بایت چک خطا (CRC)
این بایت که در انتهای فریم قرار میگیرد وظیفه تشخیص خطا در کل فریم را برعهده دارد. روش تشخیص خطا به این صورت میباشد که مقدار بایت CRC از روی بایتهای قبلی براساس یک قاعده مشخصی محاسبه میشود و سپس فریم ارسال میگردد. در سمت گیرنده مجدد بایت CRC از روی دادههای ارسال شده محاسبه شده و با بایت CRC خود فریم مقایسه میشود. در صورتی که با هم تفاوت داشته باشند یعنی خطایی به هنگام ارسال دادهها رخ داده است.
در ادامه به توضیح فرامین مهم جدول ۹ -۱ میپردازیم:
0x08: تنظیم نحوه عملکرد سرو درایور هنگام اعمال ورودی فعال ساز
مطابق شکل ۵ -۴ پایههای ENA+ و ENA- در سرودرایور مربوط به فعال و غیرفعالسازی سرو درایور میباشند. باتوجه به مقدار بایتهای داده مطابق جدول ۹ -۲ نحوه عملکرد سرودرایور به هنگام اعمال ورودی فعالساز در مدل کنترل سرعت مبتنی بر تاکوژنراتور تنظیم خواهد شد.
جدول ۹-۲: نحوه عملکرد سرو درایور هنگام اعمال ورودی فعال ساز
| مقدار بایتهای داده | عملکرد سرو درایور هنگام اعمال ورودی فعال ساز |
|
3F800000 (معادل ۱ دسیمال) |
قفل شدن شفت موتور در مد کنترل سرعت مبتنی بر تاکو ژنراتور با استفاده از مد کنترل موقعیت مبتنی بر انکودر افزایشی |
|
40000000 (معادل ۲ دسیمال) |
قفل شدن شفت موتور در مد کنترل سرعت مبتنی بر تاکو ژنراتور با استفاده از مد کنترل موقعیت مبتنی بر انکودر مطلق |
|
40400000 (معادل ۳ دسیمال) |
قفل شدن شفت موتور در مد کنترل سرعت مبتنی بر انکودر افزایشی با استفاده از مد کنترل موقعیت مبتنی بر انکودر افزایشی |
|
40800000 (معادل ۴ دسیمال) |
قفل شدن شفت موتور در مد کنترل سرعت مبتنی بر انکودر مطلق با استفاده از مد کنترل موقعیت مبتنی بر انکودر مطلق |
| سایر مقادیر | توقف اضطراری موتور با شفت بدون حالت قفل |
0x09: تنظیم ضریب کالیبراسیون تاکو ژنراتور دی سی
تاکو ژنراتور دی سی یک سنسور سنجش سرعت میباشد. ساختار تاکوژنراتور شبیه ساختار موتور دیسی مغناطیس دائم میباشد. این ابزار به شفت موتور کوپل شده و متناسب با سرعت موتور یک ولتاژ مثبت یا منفی دی سی تولید میکند. از این ولتاژ میتوان به عنوان فیدبک سرعت جهت کنترل سرعت موتور استفاده کرد.
تاکوژنراتورها از نظر تولید میزان ولتاژ تولید شده برحسب سرعت موتور با یکدیگر متفاوت میباشند. با تنظیم ضریب کالیبراسیون تاکوژنراتور میتواند بهترین عملکرد را حاصل نمود. مقدار پیش فرض ضریب کالیبراسیون تاکوژنراتور در سرو درایور عدد ۸ میباشد.
0x0A: تنظیم حداکثر ولتاژ تغذیه بر حسب ولت
در مد کنترل ولتاژ بهتر است که حداکثر ولتاژ تغذیه سرو درایور تنظیم شود. با تنظیم حداکثر ولتاژ تغذیه مقدار رنج ورودی آنالوگ و عرض پالس اعمالی کالیبره میشوند تا بهترین رزلوشن حاصل گردد. در صورت عدم تنظیم مقدار پیش فرض حداکثر ولتاژ تغذیه ۲۴ ولت میباشد.
0x0B: تنظیم لیمیت کنترلر جریان بر حسب آمپر
موتورهای الکتریکی به هنگام استارت میتوانند تا چندین برابر جریان نامی خود جریان بکشند. که این امر میتواند منجر به آسیب رسیدن به سیستم کموتاتور جاروبک در موتور شده و باعث کاهش طول عمر آن گردد. همچین کشیدن جریان بیش از حد تحمل سرو درایور میتواند باعث آسیب به سرو درایور نیز گردد. بنابراین باید لیمیت کنترلر جریان متناسب با مشخصات موتور و سرو درایور تنظیم گردد. علاوه برآن تنظیم لیمیت جریان باعث بهبود رزولوشن ورودی آنالوگ و پالس در مد کنترل جریان میشود.
0x0C: تنظیم لیمیت کنترلر سرعت بر حسب ولت
در مد کنترل سرعت مبتنی بر تاکو ژنراتور دی سی با تنظیم لیمیت سرعت بر حسب ولت سرو درایور اجازه اعمال ولتاژ (سرعت) بیش از لیمیت تنظیم شده رو به موتور نخواهد داد. همچنین در مد کنترل موقعیت لیمیت سرعت حداکثر سرعت بر حسب ولت را مشخص خواهد کرد. به عنوان مثال به هنگام رفتن از نقطه A به نقطه B میتوان تعیین نمود که با حداکثر چه سرعتی (بر حسب ولت) این جابجایی صورت پذیرد.
۹ -۱- ۲- ساختار فریم تصدیق (Acknowledgment)
چنانچه هدف فریم ارسالی تنظیم جریان، سرعت و موقعیت باشد و یا تنظیم یکی از پارامترها، یک فریم از سمت سرو درایور ارسال میشود که مشخص کننده صحت ارسال میباشد. ساختار فریم تصدیق مشابه فریم ارسالی بوده تنها به جای بایت فرمان (Command) مقدار 0xFD جایگزین خواهد شد. به عبارتی همان فریم ارسالی به عنوان فریم تصدیق از سمت سرو درایور ارسال میشوند و تنها فقط بایت فرمان با مقدار 0xFD جایگزین شده است.

شکل ۹-۲: ساختار فریم تصدیق
۹ -۱- ۳- ساختار فریم فیدبک (Feedback)
چنانچه هدف از فریم ارسالی درخواست ارسال ولتاژ باس، ولتاژ موتور، جریان موتور، مقاومت و اندوکتانس سیم پیچ موتور و یا مقدار سایر پارامترها باشد فریم فیدبک از سمت سرو درایور ارسال میشود. ساختار فریم فیدبک نیز مشابه ساختار فریم ارسالی میباشد با این تفاوت که مقدار پارامتر درخواست شده به جای ۴ بایت دیتا قرار داده شده است.

شکل ۹-۳: ساختار فریم فیدبک
۹ -۲- تبدیل عدد دسیمال به فرمت IEEE754 و برعکس به کمک مبدلهای تحت وب
راحت ترین راه جهت تبدیل عدد دسیمال به فرمت IEEE754 استفاده از مبدلهای تحت وب میباشد. یکی از این مبدلهای آنلاین سایت binaryconvert است. مطابق شکل ۴-۹ به منظور تبدیل عدد دسیمال به فرمت IEEE754 عدد مورد نظر را در قسمت Decimal تایپ کرده و روی Convert to binary کلیک کنید. برعکس جهت تبدیل عدد با فرمت IEEE754 به دسیمال عدد مورد نظر را در قسمت Binary تایپ کرده و روی Convert to decimal کلیک نمایید.

شکل ۹-۴: مبدل تحت وب تبدیل عدد دسیمال به فرمت IEEE754 و برعکس
در شکل ۹ -۵ عدد دسیمال ۷۵/۱۹ به فرمت IEEE754 تبدیل شده است که مقدار آن 0x419E0000 میباشد. در شکل ۹-۶ نیز مجدد عدد با فرمت IEEE754 به معادل دسیمال تبدیل شده است.

شکل ۹-۵: تبدیل عدد دسیمال به فرمت IEE754 توسط مبدل تحت وب

شکل ۹-۶: تبدیل عدد با فرمت IEE754 معادل دسیمال توسط مبدل تحت وب
۹ -۳- تئوری تبدیل عدد دسیمال به فرمت IEEE754 و برعکس (روش علمی)
در سرو درایور AMD60 از استاندارد IEEE754 جهت ارسال و دریافت دادهها از طریق پروتکلهای UART، USB و RS485 استفاده شده است.
۹ -۳- ۱- عدد دسیمال به فرمت IEEE754
استاندارد IEEE754 دارای ۲ دقت Single و Double میباشد. در سرو درایور AMD60 از استاندارد IEEE754 با دقت Single استفاده شده است. ساختار استاندارد IEEE754 با دقت Single در شکل ۹-۷ نشان داده شده است.

شکل ۹-۷: استانداردIEEE754 با دقت Single
مطابق شکل ۹-۷ فرمت IEEE754 با دقت Single دارای ۳۲ بیت میباشد که از سه بخش تشکیل شده است. بخش اول که شامل یک بیت میباشد Sign نام دارد. به بخش دوم که دارای ۸ بیت است Exponent میگویند. بخش Mantissa یا Fraction نیز از ۲۳ بیت تشکیل شده است. در ادامه روند تبدیل عدد دسیمال ۱۲۵/۲۴ به فرمت IEEE754 با دقت Single توضیح داده شده است.
مرحله ۱: جداسازی قسمتهای صحیح و اعشار از یکدیگر
ابتدا قسمت صحیح و اعشار عدد مورد نظر را جدا نمایید. مطابق شکل ۹-۸ قسمتهای صحیح و اعشار عدد ۲۴٫۱۲۵ به ترتیب ۲۴ و ۰٫۱۲۵ میباشند.

شکل ۹-۸: جداسازی قسمت صحیح و اعشار
مرحله ۲: تبدیل قسمت صحیح به باینری
قسمت صحیح را به معادل باینری آن تبدیل نمایید. در این مثال معادل باینری ۲۴ مقدار ۱۱۰۰۰ میباشد. روند تبدیل در جدول ۹-۳ نشان داده شده است.

جدول ۹-۳: تبدیل قسمت صحیح به باینری
مرحله ۳: تبدیل قسمت اعشار به باینری
قسمت اعشاری عدد ۲۴٫۱۲۵ یعنی ۰٫۱۲۵ را به معادل باینری آن تبدیل نمایید.روند تبدیل در جدول ۹-۴ نمایش داده شده است. حاصل این تبدیل ۰٫۰۰۱ میباشد.

جدول ۹-۴: تبدیل قسمت اعشار به باینری
مرحله ۴: ترکیب معادل باینری قسمت صحیح و اعشار با یکدیگر
قسمت صحیح و اعشاری را با یدیگر ترکیب نمایید. برای عدد عدد ۲۴٫۱۲۵ معادل باینری آن عدد ۱۱۰۰۰٫۰۰۱ خواهد شد.
مرحله ۵: تبدیل عدد حاصل شده به صورت نمایش علمی مبنای ۲
اکنون عدد ۱۱۰۰۰٫۰۰۱ را به صورت نماد علمی مبنای ۲ نمایش دهید. حاصل عبارت است از:
1.1000001×24
مرحله ۶: تعیین علامت عدد و نمایش به صورت باینری
با توجه به علامت عدد ۲۴٫۱۲۵ بیت علامت رو تعیین نمایید. مطابق شکل ۹-۹ چنانچه عدد مثبت باشد بیت علامت ۰ و چنانچه عدد منفی باشد بیت علامت ۱ میباشد.

شکل ۹-۹: تعیین مقدار بیت علامت
مرحله ۷: تعیین قسمت Exponent
در استاندارد IEEE754 با دقت Single و Double یک مقدار بایاس تعریف میشود. این مقدار بایاس برای دقت Single عدد ۱۲۷ میباشد. برای تعیین قسمت Exponent توان عدد ۲ که در مرحله ۵ بدست آوردیم(یعنی عدد ۴) را با عدد بایاس ۱۲۷ جمع کرده (۱۳۱ = ۱۲۷ + ۴) و حاصل را پس از تبدیل به باینری در قسمت Exponent مطابق شکل ۹-۱۰ قرار میدهیم.

شکل ۹-۱۰: تعیین مقدار Exponent
مرحله ۸: تعیین قسمت Mantissa
مقدار Mantissa قسمت اعشار نمایش مبنای علمی ۲ که در مرحله ۵ حاصل شد میباشد. مطابق شکل ۹-۱۰ قسمت Mantissa در جایگاه مربوطه قرار داده شده است.

شکل ۹-۱۱: تعیین مقدار Mantissa
مرحله ۹: ترکیب سه قسمت حاصل شده به صورت یک عدد
به جای بیتهای باقیمانده مقدار “۰” قرار دهید. مطابق شکل ۹-۱۲ معادل IEEE754 عدد دسیمال ۲۴٫۱۲۵ در نمایش باینری عدد “0 10000011 10000010000000000000000” و در نمایش هگزادسیمال عدد “0x41C10000” میباشد.

شکل ۹-۱۲: عدد IEEE754 تبدیل شده نهایی
۹ -۳- ۲- تبدیل عدد با فرمت IEEE754 به معادل دسیمال
در این قسمت عدد “0 10000011 10000010000000000000000” با فرمت IEEE754 را به معادل دسیمال آن تبدیل میکنیم.
مرحله یک: بیتها را به سه قسمت دسته بندی نمایید.
- بیت ۳۱ یا آخرین بیت سمت چپ علامت عدد را نشان میدهد.
- بیتهای ۲۳ تا ۳۰ قسمت Exponent میباشد.
- بیت های ۰ تا ۲۲ قسمت Mantissa میباشد.
مرحله دو: بیت علامت را در نظر بگیرید.
اگر بیت علامت ۱ باشد عدد منفی و اگر صفر باشد عدد مثبت میباشد. از آنجایی که بیت علامت ۰ است پس علامت عدد مورد نظر مثبت خواهد بود.
مرحله سه: قسمت Exponent را در نظر گرفته و معادل دسیمال آن را حساب نمایید.
بیتهای ۲۳ تا ۳۰ عدد “10000011” میباشد که اگر آن را به دسیمال تبدیل نماییم عدد ۱۳۱ حاصل میشود.
مرحله چهار: قسمت Mantissa را به مبنای ۱۰ تبدیل کنید.
قسمت Mantissa عدد “10000010000000000000000” میباشد بنابراین:
فرمول
مرحله پنج: با استفاده از رابطه زیر معادل دسیمال را محاسبه کنید.
۹ -۴- تئوری محاسبه بایت CRC
در انتقال دادهها به صورت دیجیتال از CRC جهت تشخیص خطا در فریم ارسالی یا دریافتی استفاده میشود. در سرو درایور AMD60 از یک بایت CRC استفاده شده است. این بایت به انتهای فریم متصل شده و به دریافتکننده کمک میکند تا خطای احتمالی رخ داده در فریم را تشخیص دهد. الگوریتمهای مختلفی برای محاسبه CRC وجود دارند که در سرو درایور AMD60 از الگوریتم CRC-8 استفاده شده است. در این الگوریتم فریم در یک چند جملهای از پیش تعیین شده XOR میشود. نحوه عملکرد XOR در جدول ۹-۵ نمایش داده شده است.
|
XOR |
0 |
1 |
|
0 |
0 |
1 |
|
1 |
1 |
0 |
چند جملهای مورد استفاده برای محاسب بایت CRC به صورت زیر میباشد.
برای استفاده از چند جملهای فوق جهت محاسبه بایت CRC باید آن را به صورت باینری نمایش دهیم. در نمایش باینری هر توانی که وجود دارد معادل یک و هر توانی که وجود ندارد معادل صفر در نظر میگیریم. نمایش باینری چند جملهای فوق عدد “0b100011101” میباشد. برای ایجاد بایت CRC توسط الگوریتم CRC-8 مراحل زیر را انجام دهید:
- ابتدا ۸ بیت صفر به انتهای فریم اضافه کنید.
- مطابق شکل ۳۷ در هر مرحله اولین ۱ در چند جملهای را با اولین ۱ از فریم ورودی در یک راستا قرار دهید و عملیاد XOR رو انجام دهید.
- عملیات را تا جایی ادامه دهید که حاصل XOR از فریم ورودی خارج شود.
- مطابق شکل ۳۷ هشت بیت زیر بیتهای صفر اضافه شده به فریم در ابتدای کار همان بایت CRC میباشند. که در این مثال عدد 0x76 میباشد.
در شکل ۹-۱۳ مراحل محاسبه بایت CRC توسط الگوریتم CRC-8 به صورت مرحله به مرحله نمایش داده شده است.

شکل ۹-۱۳: محاسب بایت CRC توسط روش CRC-8
همچنین جهت محاسبه بایت CRC توسط الگوریتم CRC-8 با چند جملهای “0b100011101” در زبان C میتوانید از کد زیر استفاده نمایید.
uint8_t Compute_CRC8(uint8_t Data_Input[], uint8_t Length){
uint8_t generator = 0x1D;
uint8_t crc = 0x00;
for(int i = 0; i < Length; i++){
crc ^= Data_Input[i];
for (int i = 0; i < 8; i++){
if ((crc & 0x80) != 0){
crc = ((crc << 1) ^ generator);
}
else{
crc <<= 1;
}
}
}
return crc;
}
۹ -۵- محاسبه بایت CRC توسط مبدلهای آنلاین
آسانترین راه جهت محاسبه بایت CRC استفاده از مبدلهای آنلاین است. یکی از این مبدلهای آنلاین سایت GHSI میباشد. به عنوان مثال فرض کنید بخواهیم سرعت موتور را در مد کنترل سرعت بر روی ۱۶۰۰ دور بر دقیقه تنظیم کنیم.
ابتدا باید عدد ۱۶۰۰ را به صورت استاندارد IEEE754 تبدیل کنیم که میتوانیم از مبدل آنلاین معرفی شده در بخشهای قبل استفاده کنیم. سپس مطابق جدول دستورات سرو درایور باید از فرمان 0x03 به منظور تنظیم سرعت موتور برحسب دور بر دقیقه استفاده کنیم. فریم ارسالی به شکل زیر خواهد بود:
FFFF0003 44C80000FE (CRC)
در فریم فوق باید مقدار بایت CRC محاسبه شود. ابتدا مطابق شکل ۹-۱۵ چند جمله “0b100011101” را در قسمت مشخص شده وارد نمایید سپس تمامی ۹ بایت قبل از CRC را وارد نموده و در نهایت دکمه Calculate را بزنید تا بایت CRC محاسبه شود.
شکل ۹-۱۵: محاسبه بایت CRC توسط مبدل آنلاین
همانطور که در شکل ۹-۱۵ مشاهده میکنید مقدار CRC عدد 0x91 میباشد. بنابراین فریم ارسالی باید به صورت زیر باشد:
FFFF0003 44C80000FE91
۹ -۶- نمونه مثال فرامین و دستورات نوشتنی و خواندنی
در جدول ۹-۶ چند نمونه فرمان به منظور راهاندازی سریع سرو درایور آورده شده است.
| فرمان | فریم ارسالی | فریم دریافتی |
| تنظیم حداکثر ولتاژ تغذیه روی ۲۴ ولت | FFFF000A41C00000FE9E | فریم تصدیق (Acknowledgement) |
| تنظیم حداکثر ولتاژ تغذیه روی ۳۶ ولت | FFFF000A42100000FEA4 | فریم تصدیق (Acknowledgement) |
| تنظیم حداکثر ولتاژ تغذیه روی ۴۸ ولت | FFFF000A42400000FE15 | فریم تصدیق (Acknowledgement) |
| تنظیم حداکثر ولتاژ تغذیه روی ۶۰ ولت | FFFF000A42700000FE7A | فریم تصدیق (Acknowledgement) |
| تنظیم حداکثر ولتاژ تغذیه روی ۷۲ ولت | FFFF000A42900000FE91 | فریم تصدیق (Acknowledgement) |
| تنظیم حداکثر ولتاژ تغذیه روی ۹۰ ولت | FFFF000A42B40000EF45 | فریم تصدیق (Acknowledgement) |
| تنظیم حداکثر ولتاژ تغذیه روی ۱۵۰ ولت | FFFF000A43160000EF77 | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب تناسبی کنترلر ولتاژ روی ۵ | FFFF001240A00000FE34 | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب انتگرالگیر کنترلر ولتاژ روی ۲۵ | FFFF001341C80000FE5A | فریم تصدیق (Acknowledgement) |
| تنظیم شتاب مثبت در حالت حلقه بسته بر روی ۵ | FFFF001040A00000FEB8 | فریم تصدیق (Acknowledgement) |
| تنظیم شتاب منفی در حالت حلقه بسته بر روی ۵ | FFFF001140A00000FEFE | فریم تصدیق (Acknowledgement) |
| تنظیم شتاب مثبت در حالت حلقه بسته برروی ۰٫۰۰۰۵ | FFFF00103A03126FFE49 | فریم تصدیق (Acknowledgement) |
| تنظیم شتاب منفی در حالت حلقه بسته برروی ۰٫۰۰۰۵ | FFFF00113A03126FFE0F | فریم تصدیق (Acknowledgement) |
| تنظیم ولتاژ روی ۳ ولت | FFFF000140400000FE01 | فریم تصدیق (Acknowledgement) |
| تنظیم ولتاژ روی ۰ ولت | FFFF000100000000FE0A | فریم تصدیق (Acknowledgement) |
| تنظیم ولتاژ روی ۳- ولت | FFFF0001C0400000FE22 | فریم تصدیق (Acknowledgement) |
| تنظیم ولتاژ روی ۱۰ ولت | FFFF000141200000FEB5 | فریم تصدیق (Acknowledgement) |
| تنظیم ولتاژ روی ۱۰- ولت | FFFF0001C1200000FE96 | فریم تصدیق (Acknowledgement) |
| تنظیم ولتاژ روی ۲۰ ولت | FFFF000141A00000FE80 | فریم تصدیق (Acknowledgement) |
| تنظیم ولتاژ روی ۲۰- ولت | FFFF0001C1A00000FEA3 | فریم تصدیق (Acknowledgement) |
| تنظیم شتاب مثبت در حالت حلقه باز بر روی ۰٫۰۱۵ | FFFF000E3C75C28FFEC3 | فریم تصدیق (Acknowledgement) |
| تنظیم شتاب منفی در حالت حلقه باز بر روی ۰٫۰۱۵ | FFFF000F3C75C28FFE85 | فریم تصدیق (Acknowledgement) |
| تنظیم شتاب مثبت در حالت حلقه باز بر روی ۲ | FFFF000E40000000FE50 | فریم تصدیق (Acknowledgement) |
| تنظیم شتاب منفی در حالت حلقه باز بر روی ۲ | FFFF000F40000000FE16 | فریم تصدیق (Acknowledgement) |
| تنظیم لیمیت کنترلر جریان بر روی ۷ آمپر | FFFF000B40E00000FEF8 | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب کالیبراسیون تاکو ژنراتور بر روی ۸ | FFFF000941000000FEF5 | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب کالیبراسیون تاکو ژنراتور بر روی ۶ | FFFF000940C00000FE3E | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب کالیبراسیون تاکو ژنراتور بر روی ۴ | FFFF000940800000FEAA | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب تناسبی کنترلر سرعت مبتنی با انکودر افزایشی روی ۰٫۲ | FFFF00183E4CCCCDFE9F | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب انتگرالگیر کنترلر سرعت مبتنی با انکودر افزایشی روی ۲ | FFFF001940000000FE8B | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب تناسبی کنترلر سرعت مبتنی با تاکو ژنراتور روی ۲۰ | FFFF001641A00000FE5B | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب انتگرالگیر کنترلر سرعت مبتنی با تاکو ژنراتور روی ۱ | FFFF00173F800000FEF1 | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب تناسبی کنترلر جریان دستی روی ۱۰ | FFFF001441200000FEE2 | فریم تصدیق (Acknowledgement) |
| تنظیم ضریب انتگرالگیر کنترلر جریان دستی روی ۹۰ | FFFF001542B40000FE44 | فریم تصدیق (Acknowledgement) |
| تنظیم جریان سیم پیچ موتور روی ۳ آمپر | FFFF000240400000FECB | فریم تصدیق (Acknowledgement) |
| تنظیم جریان سیم پیچ موتور روی ۰ آمپر | FFFF000200000000FEC0 | فریم تصدیق (Acknowledgement) |
| تنظیم جریان سیم پیچ موتور روی ۳- آمپر | FFFF0002C0400000FEE8 | فریم تصدیق (Acknowledgement) |
| فرمان ارسال ولتاژ خط تغذیه (ولتاژ باس) | FFFF003000000000FE70 | FFFF003041A2D5D3FEAF
(معادل با ۲۰٫۳۵ ولت) |
| فرمان ارسال ولتاژ ترمینال موتور (ولتاژ دو سر موتور،ولتاژ خروجی درایور) | FFFF003100000000FE36 | FFFF003140F4D93CFEA4
(معادل ۷٫۶۵ ولت) |
| فرمان ارسال جریان سیم پیچ موتور | FFFF003200000000FEFC | FFFF00323FFD9B26FEB6
(معادل ۱٫۹۸ آمپر) |
| فرمان ارسال تعداد پالس انکودر افزایشی | FFFF003300000000FEBA | FFFF0033C5835000FE2E
(معادل ۴۲۰۲-) |
| تنظیم موقعیت موتور روی ۴۵ درجه | FFFF000442340000FE23 | فریم تصدیق (Acknowledgement) |
| تنظیم موقعیت موتور روی ۰ درجه | FFFF000400000000FE49 | فریم تصدیق (Acknowledgement) |
| تنظیم موقعیت موتور روی ۴۵- درجه | FFFF0004C2340000FE00 | فریم تصدیق (Acknowledgement) |
| تنظیم موقعیت موتور روی ۴۵۰ درجه | FFFF000443E10000FE1E | فریم تصدیق (Acknowledgement) |
| تنظیم موقعیت موتور روی ۴۵۰- درجه | FFFF0004C3E10000FE3D | فریم تصدیق (Acknowledgement) |
| تنظیم موقعیت موتور روی ۴۵۰۰ درجه | FFFF0004458CA000FE1E | فریم تصدیق (Acknowledgement) |
| تنظیم موقعیت موتور روی ۴۵۰۰- درجه | FFFF0004C58CA000FE3D | فریم تصدیق (Acknowledgement) |
| فرمان فعال کردن ورودی آنالوگ | FFFF002C00000000FE6B | فریم تصدیق (Acknowledgement) |
| فرمان غیر فعال کردن ورودی آنالوگ | FFFF002C3F800000FE0D | فریم تصدیق (Acknowledgement) |
| فرمان فعال کردن ورودی پالس | FFFF002D00000000FE2D | فریم تصدیق (Acknowledgement) |
| فرمان غیر فعال کردن ورودی پالس | FFFF002D3F800000FE4B | فریم تصدیق (Acknowledgement) |
| فرمان قفل شدن شفت موتور در مد کنترل سرعت مبتنی بر تاکو ژنراتور با استفاده از مد کنترل موقعیت مبتنی بر انکودر مطلق | FFFF000840000000FED9 | فریم تصدیق (Acknowledgement) |
| تنظیم آفست سنسور ولتاژ | FFFF00F400000000FE85 | فریم تصدیق (Acknowledgement) |
| تنظیم آفست سنسور جریان | FFFF00F600000000FE09 | فریم تصدیق (Acknowledgement) |
| تنظیم آفست تاکو ژنراتور دی سی | FFFF00F800000000FE8A | فریم تصدیق (Acknowledgement) |
| تنظیم تعداد پالس بر دور انکودر افزایشی روی ۱۰۰۰۰ | FFFF0024461C4000FE08 | فریم تصدیق (Acknowledgement) |
| تنظیم تعداد پالس بر دور انکودر افزایشی روی ۵۰۰۰ | FFFF0024459C4000FE83 | فریم تصدیق (Acknowledgement) |
| تنظیم تعداد پالس بر دور انکودر افزایشی روی ۲۵۰۰ | FFFF0024451C4000FEB6 | فریم تصدیق (Acknowledgement) |
| تنظیم تعداد پالس بر دور انکودر افزایشی روی ۱۰۰۰ | FFFF0024447A0000FE0B | فریم تصدیق (Acknowledgement) |
| تنظیم تعداد پالس بر دور انکودر افزایشی روی ۱۰۰ | FFFF002442C80000FE17 | فریم تصدیق (Acknowledgement) |
| فرمان ارسال مقاومت سیمپیچ شناسایی شده | FFFF005D00000000FE41 | فریم تصدیق (Acknowledgement) |
۱۰- شروع کار با سرو درایور AMD60
برای شروع کار با سرو درایور مطمئن شوید که بخشهای قبلی را با دقت مطالعه کردهاید.
۱۰ -۱- راهاندازی سریع سرو درایور
در این قسمت دو روش راه اندازی سریع سرو درایور از طریق پتانسیومتر و از طریق کابل USB آورده شده است.

شکل ۱۰-۱: حداقل سیم کشی لازم جهت راه اندازی سرو درایور
۱۰ -۱- ۱- راهاندازی سریع سرو درایور با پتانسیومتر
مرحله ۱: ابتدا مطابق شکل ۱۰-۱ حداقل سیم کشی لازم جهت راه اندازی سرو درایور را برقرار نمایید.
مرحله ۲: مطابق شکل ۱۰-۲ دیپ سوئیچ شماره یک را در حالت OFF قرار دهید تا درایور در مد حلقه باز قرار گیرد. موقعیت سایر دیپ سوئیچها نیز مشابه شکل۱۰-۲ تنظیم شود.
شکل ۱۰-۲: انتخاب مد حلقه باز
مرحله ۳: مطابق شکل۱۰-۱ سوئیچ قطع و وصل تغذیه را وصل نمایید. به محض وصل کردن تغذیه یک عدد چراغ که داخل درایور میباشد روشن خواهد شد. همچنین مطابق شکل 5-2 LED های مقابل سرو درایور با فاصله زمانی ۱۰۰ میلی ثانیه از هم شروع به چشمک زدن خواهند کرد.
مرحله ۴: اکنون با چرخاندن پتانسیومتر سرو درایور با لیمیت جریان ۱۵ آمپر و شتاب حداقلی پیش فرض شروع به راه اندازی موتور خواهد کرد.
مرحله ۵: تغییر لیمیت جریان. به منظور تغییر لیمیت جریان مطابق شکل ۷-۲ دیپ سوئیچ شماره ۶ را در حالت ON قرار داده و باتوجه به شکل ۷-۳ لیمیت جریان مد نظر خود را تنظیم کرده و مجدد دیپ سوئیچ شماره ۶ را در حالت OFF قرار داده تا مقدار تنظیم شده برروی حافظه طولانی مدت سرو درایور ذخیره گردد.
مرحله ۶: تغییر شتاب سرو درایور. به منظور تغییر شتاب موتور دیپ سوئیچ شماره ۶ را در حالت ON قرار داده و مطابق شکل ۱۰-۳ با چرخاندن ولوم ACC.ramp در جهت عقربههای ساعت میزان شتاب موتور را کاهش دهید. پس تنظیم شتاب مجدد دیپ سوئیچ شماره ۶ را به حالت OFF برگردانید تا میزان شتاب تنظیم شده در حافظه طولانی مدت سرو درایور ذخیره گردد.

شکل ۱۰-۳: جهت چرخش پتانسیومتر ACC.ramp به منظور کاهش شتاب موتور
۱۰ -۱- ۲- راهاندازی سریع سرو درایور از طریق پروتکل USB
به منظور راهاندازی سریع سرو درایور از طریق پروتکل USB باید از یکی از نرم افزارهای انتقال دادههای سریال استفاده کنید. برای راهاندازی درایور MDC20 و سرو درایور MHD4830 از نرم افزار هرکولس استفاده کردهایم. ولی برای راهاندازی سرو درایور AMD60 قصد داریم از یک گوگل کروم API استفاده کنیم. جهت لانچ شدن این API بر روی این لینک کلیک کنید. سپس در لینک باز شده روی دکمه Launch app کلیک کرده تا API باز شود. برای لانچ شدن API حتما باید از گوگل کروم استفاده کنید. محیط API همانند شکل۴۳ میباشد.
مرحله ۱: ابتدا مطابق شکل ۱۰-۱ حداقل سیم کشی لازم جهت راهاندازی سرو درایور را برقرار نمایید. چون میخواهیم از طریق پروتکل USB سرو درایور را کنترل نماییم نیازی به اتصال پتانسیومتر خارجی نیست.
مرحله ۲: مطابق شکل ۱۰-۲ دیپ سوئیچ شماره یک را در حالت OFF قرار دهید تا درایور در مد حلقه باز قرار گیرد. موقعیت سایر دیپ سوئیچها نیز مشابه شکل ۱۰-۲ تنظیم شود.
مرحله ۳: مطابق شکل ۱۰-۱ سوئیچ قطع و وصل تغذیه را وصل نمایید. به محض وصل کردن تغذیه یک عدد چراغ که داخل درایور میباشد روشن خواهد شد. همچنین مطابق شکل ۲-۵ LED های مقابل سرو درایور با فاصله زمانی ۱۰۰ میلی ثانیه از هم شروع به چشمک زدن خواهند کرد.
شکل ۱۰-۴: محیط کاربری گوگل کروم API استفاده شده برای ارتباط دیجیتال با سرو درایور
مرحله ۴: درایور را از طریق کابل USB به کامپیوتر متصل نمایید. سپس به Device Manager کامپیوتر رفته و قسمت پورتها را چک کنید. مطابق شکل۱۰-۵ باید سرو درایور به عنوان یک پورت مجازی توسط کامپیوتر شناخته شود.

شکل ۱۰-۵: شناخت سرو درایور توسط کامپیوتر
مرحله ۵: مطابق شکل ۱۰-۶ شماره پورت و نرخ ارسال دادهها را در قسمت Port Settings وارد نمایید. نرخ ارسال پیش فرض سرو درایور ۵۷۶۰۰ بیت در ثانیه میباشد. سپس روی دکمه Connect کلیک کنید. در صورتی که اتصال به درستی صورت پذیرفته باشد پیغام سبز رنگ Connection open زیر دکمه Connect نمایان خواهد شد.
شکل ۱۰-۶: اتصال به سرو درایور و ارسال فرمان سرعت و دریافت فریم تصدیق
مرحله ۶: ارسال فرمان سرعت. فرض کنید بخواهیم ولتاژ ترمینال موتور را بر روی ۱۰ ولت در مد حلقه باز تنظیم نماییم. مطابق جدول ۹-۶ باید فریم زیر برای سرو درایور ارسال شود.
FFFF000141200000FEB5
باید فریم بالا را مطابق شکل ۱۰-۶ در کادر User Input وارد نمایید. توجه نمایید که حتما بین هر بایت یک فاصله قرار دهید. در غیر این صورت تنها بایت اول برای سرو درایور ارسال خواهد شد. سپس بر روی دکمه TX کلیک نمایید تا فریم برای سرو درایور ارسال شود. در صورتی که ارسال صورت پذیرد، فریم ارسالی در قسمت <فریم ارسالی> قابل مشاهده خواهد بود. همچنین در صورتی که فریم ارسالی به درستی و بدون نقص توسط سرو درایور دریافت گردد یک فریم تصدیق از سمت سرو درایور ارسال خواهد شد که در قسمت <فریم دریافتی(تصدیق)> نمایش داده خواهد شد.
۱۰ -۲- راهاندازی سرو درایور در مدهای کنترلی حلقه بسته
سرو درایور AMD60 دارای چهار مد کنترلی حلقه بسته میباشد که عبارتاند از: مد کنترل ولتاژ، مد کنترل جریان (گشتاور)، مد کنترل سرعت و مد کنترل موقعیت. هر یک از این مدها به صورت مجزا از طریق ورودی آنالوگ، ورودی پالس، USB، UART و RS485 میتوانند فرمان بپذیرند. در ادامه به توضیح هریک از این مدهای کنترلی حلقه بسته میپردازیم.
۱۰ -۲- ۱- راهاندازی سرو درایور در مد کنترل ولتاژ
در مد کنترل ولتاژ سرو درایور AMD60 ولتاژ دو سر ترمینال موتور را کنترل میکند. این مد مناسب سیستمهای مبتنی بر باتری میباشد بطوریکه که با کاهش ولتاژ باتری به مرور زمان ولتاژ دو سر موتور ثابت خواهد ماند و موتور دچار افت سرعت نخواهد شد.
مرحله ۱: ابتدا سیمکشی لازم جهت راهاندازی سرو درایور را برقرار نمایید. به عنوان مثلا چنانچه هدف کنترل ولتاژ از طریق ولتاژ آنالوگ هست میتوانید از مدارهای شکل ۸-۱، شکل ۸-۲ و شکل ۸-۳ استفاده نمایید. اگر میخواهید از طریق پالس سرو درایور را کنترل کنید از مدارهای شکل ۸-۴ و یا شکل ۸-۵ بهره بگیرید. در نهایت اگر هدف کنترل سرو درایور از طریق USB، UART و RS485 میباشد میتوانید سرو درایور را از طریق این پروتکلها مطابق مدارهای شکل ۸-۶، شکل ۸-۷ و شکل ۸-۸ به کنترلر مد نظر وصل نمایید.
مرحله ۲: مطابق شکل ۱۰-۷ دیپ سوئیچ شماره یک را در حالت ON قرار دهید تا درایور در مد حلقه بسته قرار گیرد. همچنین دیپ سوئیچهای شماره ۲، ۳، ۴ و ۵ را در حالت ON قرار دهید تا مد کنترل ولتاژ انتخاب گردد. موقعیت دیپ سوئیچ شماره۶ فعلا در وضعیت OFF باشد.

شکل ۱۰-۷: انتخاب مد کنترل ولتاژ
مرحله ۳: سوئیچ قطع و وصل تغذیه را وصل نمایید. به محض وصل کردن تغذیه یک عدد چراغ که داخل درایور میباشد روشن خواهد شد. همچنین LED های مقابل سرو درایور با فاصله زمانی ۱۰۰ میلی ثانیه از هم شروع به چشمک زدن خواهند کرد.
مرحله ۴: تنظیم پارامترهای سرو درایور. پارامترهای سرو درایور به دو طریق قابل تنظیم هستند. روش دستی و یا از طریق پروتکل. پارامترهای قابل تنظیم در حالت دستی شتاب و ضرایب کنترلر ولتاژ میباشند. برای تنظیم پارامترها به صورت دستی دیپ سوئیچ شماره۶ را در حالت ON قرار دهید. سپس ابتدا با استفاده از ولتاژ آنالوگ، پالس و یا پروتکل (USB، UART، RS485) ولتاژ خروجی را بر روی یک عدد معین قرار دهید. سپس با تنظیم ولوم Kp و Ki و قرار دادن ولتاژ بر روی مقادیر مختلف سعی کنید به یک عملکرد مطلوب برسید. همچنین با تنظیم ولوم ACC میتوانید شتاب موتور را نیز تنظیم نماید. جهت چرخش ولوم های تنظیمی به منظور افزایش پارامتر در شکل ۱۰-۸ نشان داده شده است. در آخر دیپ سوئیچ شماره ۶ را از حالت ON خارج کنید تا پارامترهای تنظیم شده بر روی حافظه طولانی مدت سرو درایور ذخیره شوند.

شکل ۱۰-۸: جهت چرخش ولومهای تنظیمی
در صورتی که بخواهید ضرایب کنترلر ولتاژ، شتاب موتور و سایر پارامترهای ذکر شده در جدول ۹-۱ را از طریق یکی از پروتکلهای USB، UART و RS485 تنظیم نمایید باید دیپ سوئیچ شماره ۶ در همان وضعیت OFF بماند. بعد از ارسال پارامتر از طریق فریم دیجیتال، مقدار پارامتر در حافظه طولانی مدت سرو درایور ذخیره خواهد شد و نیازی به تنظیم مجدد آن با قطع برق نمیباشد.
۱۰ -۲- ۲- راهاندازی سرو درایور در مد کنترل گشتاور (کنترل جریان)
در مد کنترل گشتاور سرو درایور با کنترل جریان موتور میتواند گشتاور اعمالی از سمت موتور به بار متصل به آن را کنترل نماید. به گونهای که با قرار گرفتن موتور زیر بار (اعمال بار خارجی به شفت موتور)، موتور گشتاوری بیش از مقدار تعیین شده را به بار اعمال نخواهد کرد. مد کنترل گشتاور در سرو درایور AMD60 به دو صورت خود تنظیم و تنظیم دستی قابل اجرا میباشد.
۱۰ -۲-۲- ۱- سرو درایور در مد کنترل گشتاور خود تنظیم
در مد کنترل گشتاور خودتنظیم سرو درایور AMD60 پارامترهای الکتریکی موتور دیسی مغناطیس دائم شامل مقاومت و اندوکتانس سیم پیچ روتور را شناسایی کرده و باتوجه به آن ضرایب کنترلر جریان را تنظیم میکند به گونهای که دیگر نیازی به تنظیم دستی ضرایب از طریق ولومهای خارجی و یا پروتکل نمیباشد. برای راه اندازی سرو درایور در مد کنترل گشتاور خودتنظیم مراحل زیر را به ترتیب انجام دهید.
مرحله ۱: ابتدا سیم کشی لازم جهت راه اندازی سرو درایور را برقرار نمایید.
مرحله ۲: موقعیت دیپ سوئیچها را مطابق شکل ۱۰-۹ قرار دهید. توجه نمایید که مطابق شکل ۱۰-۹ موقعیت دیپ سوئیچ شماره یک در حالت OFF قرار داشته باشد.

شکل ۱۰-۹: انتخاب مد کنترل گشتاور خود تنظیم
مرحله ۳: کلید وصل و قطع تغذیه سرو درایور را متصل نمایید.
مرحله ۴: پس از روشن شدن سرو درایور دیپ سوئیچ شماره یک را در حالت ON قرار دهید. به محض قرار دادن دیپ سوئیچ شماره یک در حالت ON سرو درایور به مدت ۵ ثانیه شروع به شناسایی پارامترهای الکتریکی موتور مینماید.
مرحله ۵: اکنون میتوانید با اعمال ورودی آنالوگ و یا پالس و یا از طریق ارسال فریمهای دیجیتال سرو درایور را در مد کنترل گشتاور استفاده کنید.
۱۰ -۲-۲-۲- راهاندازی سرو درایور در مد کنترل گشتاور تنظیم دستی
در این مد باید ضرایب کنترلر جریان را به صورت دستی تنظیم نمایید.
مرحله ۱: ابتدا سیم کشی لازم جهت راه اندازی سرو درایور را برقرار نمایید.
مرحله ۲: موقعیت دیپ سوئیچها را مطابق شکل ۱۰-۱۰ قرار دهید.

شکل ۱۰-۱۰: انتخاب مد کنترل گشتاور با تنظیم دستی ضرایب کنترلر PI
مرحله ۳: کلید وصل و قطع تغذیه سرو درایور را متصل نمایید.
مرحله ۴: دیپ سوئیچ شماره ۶ را در حالت ON قرار دهید. سپس با تنظیم ولوم Kp و Ki و قرار دادن رفرنس جریان بر روی مقادیر مختلف سعی کنید به یک عملکرد مطلوب برسید. همچنین با تنظیم ولوم ACC میتوانید شتاب موتور را نیز تنظیم نماید. در آخر دیپ سوئیچ شماره ۶ را از حالت ON خارج کنید تا پارامترهای تنظیم شده بر روی حافظه طولانی مدت سرو درایور ذخیره شوند.
۱۰ -۲- ۳- راهاندازی سرو درایور در مد کنترل سرعت
سرو درایور AMD60 میتواند به صورت سنسورلس و یا مبتنی بر سنسور سرعت موتور دی سی مغناطیس دائم را کنترل نماید. در مد کنترل سرعت مبتنی بر سنسور به منظور کنترل دقیق سرعت بایستی از یکی از سنسورهای تاکو ژنراتور دی سی، انکودر افزایشی و یا انکودر مطلق به منظور سنجش و کنترل سرعت موتور توسط سرو درایور استفاده کرد. منظور از کنترل سرعت این است که با تغییر بار متصل به شفت موتور سرعت ثابت خواهد ماند. اما در مد کنترل سرعت سنسورلس سرو درایور با شناسایی پارامترهای موتور و تخمین سرعت قادر است تحت شرایط نوسانات بار متصل به موتور سرعت آن را ثابت نگه دارد.
۱۰ -۲ -۳- ۱- سرو درایور در مد کنترل سرعت سنسورلس
برای راه اندازی سرو درایور AMD60 در مد کنترل سرعت سنسورلس طبق مراحل زیر عمل نمایید.
مرحله ۱: ابتدا سیم کشی لازم جهت راه اندازی سرو درایور را برقرار نمایید.
مرحله ۲: موقعیت دیپ سوئیچها را مطابق شکل ۱۰-۱۱ قرار دهید.

شکل ۱۰-۱۱: انتخاب مد کنترل سرعت سنسورلس
مرحله ۳: کلید قطع و وصل تغذیه سرو درایور را متصل نمایید.
مرحله ۴: پس از روشن شدن سرو درایور دیپ سوئیچ شماره یک را در حالت ON قرار دهید. به محض قرار دادن دیپ سوئیچ شماره یک در حالت ON سرو درایور به مدت ۵ ثانیه شروع به شناسایی پارامترهای الکتریکی موتور مینماید.
مرحله ۵: دیپ سوئیچ شماره ۶ را در حالت ON قرار دهید. سپس با تنظیم ولوم Kp و Ki و قرار دادن رفرنس سرعت بر روی مقادیر مختلف سعی کنید به یک عملکرد مطلوب برسید. همچنین با تنظیم ولوم ACC میتوانید شتاب موتور را نیز تنظیم نماید. در آخر دیپ سوئیچ شماره ۶ را از حالت ON خارج کنید تا پارامترهای تنظیم شده بر روی حافظه طولانی مدت سرو درایور ذخیره شوند.
۱۰ -۲ -۳- ۲- راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر تاکو ژنراتور دی سی
برای راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر تاکو ژنراتور دی سی ابتدا سرو درایور را در مد کنترل گشتاور با تنظیم دستی ضرایب کنترلر PI راهاندازی نموده و به درستی تنظیم نمایید. سپس به منظور راهاندازی در مد کنترل سرعت مبتنی بر تاکو ژنراتور مراحل زیر را انجام دهید.
مرحله ۱: ابتدا سیم کشی لازم جهت راه اندازی سرو درایور را برقرار نمایید. مطابق شکل ۱۰-۱۲ سیمهای تاکو ژنراتور به ورودیهای TACHO- و TACHO+ وصل شدهاند.

شکل ۱۰-۱۲: حداقل سیم کشی لازم جهت راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر تاکو ژنراتور دی سی
مرحله ۲: موقعیت دیپ سوئیچها را مطابق شکل ۱۰-۱۳ قرار دهید.

شکل ۱۰-۱۳: قرار دادن سرو درایور در مد کنترل سرعت مبتنی بر تاکو ژنراتو دی سی
مرحله ۳: در صورتی که بعد از تنظیم سرو درایور در مد کنترل گشتاور با تنظیم دستی ضرایب کنترلر PI سرو درایور را خاموش کردهاید کلید قطع و وصل تغذیه سرو درایور را متصل نمایید.
مرحله ۴: موقعیت پتانسیومترهای ACC.ramp، Kp.gain و Ki.gain را در ابتدای رنج قرار دهید (چرخش بر خلاف عقربههای ساعت). دیپ سوئیچ شماره ۶ را در حالت ON قرار دهید. سپس با تنظیم ولوم Kp و Ki و قرار دادن رفرنس سرعت بر روی مقادیر مختلف سعی کنید به یک عملکرد مطلوب برسید. همچنین با تنظیم ولوم ACC میتوانید شتاب موتور را نیز تنظیم نماید. در آخر دیپ سوئیچ شماره ۶ را از حالت ON خارج کنید تا پارامترهای تنظیم شده بر روی حافظه طولانی مدت سرو درایور ذخیره شوند.
۱۰ -۲ -۳- ۳- راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر انکودر افزایشی
برای راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر انکودر افزایشی ابتدا سرو درایور را در مد کنترل گشتاور با تنظیم دستی ضرایب کنترلر PI راهاندازی نموده و به درستی تنظیم نمایید. سپس به منظور راهاندازی در مد کنترل سرعت مبتنی بر انکودر افزایشی مراحل زیر را انجام دهید.
مرحله ۱: ابتدا سیمکشی لازم جهت راهاندازی سرودرایور را برقرار نمایید. تغذیه انکودرهای افزایشی معمولا ۵ ولت و یا ۲۴ ولت میباشد. برای اتصال انکودر ۵ ولت مطابق شکل ۱۰-۱۴ و برای اتصال انکودر ۲۴ ولت مطابق شکل ۱۰-۱۵ عمل نمایید.

شکل ۱۰-۱۴: راه اندازی سرو درایور در مد کنترل سرعت مبتنی بر انکودر افزایشی ۵ ولت
شکل ۱۰-۱۵: راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر انکودر افزایشی ۲۴ ولت
مرحله ۲: موقعیت دیپ سوئیچها را مطابق شکل ۱۰-۱۶ قرار دهید.

شکل ۱۰-۱۶: قرار دادن سرو درایور در مد کنترل سرعت مبتنی بر انکودر افزایشی
مرحله ۳: در صورتی که بعد از تنظیم سرو درایور در مد کنترل گشتاور با تنظیم دستی ضرایب کنترلر PI سرو درایور را خاموش کردهاید کلید قطع و وصل تغذیه سرو درایور را متصل نمایید.
مرحله ۴: از طریق پروتکل USB، UART و یا RS485 مطابق جدول ۹-۱ با استفاده از فرمان 0x24 تعداد پالس بر دور انکودر افزایشی را تنظیم نمایید. تعداد پالس بر دور پیش فرض انکودر افزایشی در سرو درایور ۲۵۰۰ پالس بر دور میباشد.
مرحله ۵: موقعیت پتانسیومترهای ACC.ramp، Kp.gain و Ki.gain را در ابتدای رنج قرار دهید (چرخش بر خلاف عقربههای ساعت). دیپ سوئیچ شماره ۶ را در حالت ON قرار دهید. سپس با تنظیم ولوم Kp و Ki و قرار دادن رفرنس سرعت بر روی مقادیر مختلف سعی کنید به یک عملکرد مطلوب برسید. همچنین با تنظیم ولوم ACC میتوانید شتاب موتور را نیز تنظیم نماید. در آخر دیپ سوئیچ شماره ۶ را از حالت ON خارج کنید تا پارامترهای تنظیم شده بر روی حافظه طولانی مدت سرو درایور ذخیره شوند.
۱۰ -۲ -۳- ۴- راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر انکودر مطلق
با قطع برق انکودر مطلق آدرس دقیق موقعیت خود را حفظ میکند و این مزیت بسیار مهم انکودر مطلق نسبت به انکودر افزایشی حساب میشود. سرودرایور AMD60 از انکودر مطلق گری SSI پشتیبانی میکند. در این نوع انکودرها برای ارسال موقعیت از پروتکل سریال SSI استفاده میشود. در این پروتکل از یک خط دیتا و یک خط کلاک به منظور ارسال دیتای موقعیت استفاده شده است. شکل ۱۰-۱۷ بلوگ دیاگرام ساده شده پروتکل SSI را نشان میدهد.

شکل ۱۰-۱۷: بلوگ دیاگرام پروتکل SSI
نحوه عملکرد پروتکل SSI به این صورت میباشد که سرو درایور هر ۲۰۰ میکرو ثانیه یک قطار پالس (Clock) برای انکودر مطلق ارسال میکند. انکودر مطلق به محض دریافت اولین لبه از پالس دیتای موقعیت رو بر روی خط Data قرار میدهد. دیتا موقعیت به صورت کد گری ارسال میشود که در سرو درایور رمزگشایی شده تا جهت استفاده در لوپ کنترل سرعت و یا موقعیت آماده شود.
برای راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر انکودر مطلق ابتدا سرو درایور را در مد کنترل گشتاور با تنظیم دستی ضرایب کنترلر PI راهاندازی نموده و به درستی تنظیم نمایید. سپس به منظور راهاندازی در مد کنترل سرعت مبتنی بر انکودر مطلق مراحل زیر را انجام دهید.
مرحله ۱: ابتدا مطابق شکل ۱۰-۱۸ حداقل سیمکشی لازم جهت راهاندازی سرودرایور را برقرار نمایید. تغذیه انکودرهای مطلق معمولا از بازه ۱۰ تا ۳۰ ولت میباشد و با اعمال ولتاژ در این بازه انکودر میتواند به خوبی عمل نماید.
شکل ۱۰-۱۸: راهاندازی سرو درایور در مد کنترل سرعت مبتنی بر انکودر مطلق SSI
۱۰ -۲- ۴- راهاندازی سرو درایور در مد کنترل موقعیت
مطابق شکل ۷-۵ سرو درایور AMD60 دارای ۴ مد کنترل موقعیت میباشد. لوپ کنترل موقعیت و سرعت را میتوان با استفاده از انکودر افزایشی و یا انکودر مطلق برقرار نمود. به منظور راهاندازی سرو درایور در مد کنترل موقعیت ابتدا بایستی لوپهای کنترل جریان و سرعت را به ترتیب تنظیم نمود. مطابق شکل ۱۰-۱۹ در سرو درایور AMD60 حلقههای کنترلی به صورتی تو در تو یا آبشاری به یکدیگر متصل شدهاند.

شکل ۱۰-۱۹: ساختار حلقه های کنترل گشتاور، سرعت و موقعیت در سرو درایور (ساختار آبشاری)
جهت راهاندازی سرو درایور در مد کنترل موقعیت مراحل زیر را انجام دهید.
مرحله ۱: ابتدا سیمکشی لازم جهت راهاندازی سرو درایور را برقرار نمایید. به عنوان مثال فرض کنید هدف کنترل موقعیت با استفاده از انکودر مطلق با حلقه کنترل سرعت مبتنی بر تاکو ژنراتور دیسی و حلقه کنترل جریان تنظیم دستی میباشد. حداقل مدار جهت راهاندازی به صورت شکل ۱۰-۲۰ خواهد بود.
مرحله ۲: کلید قطع و وصل سرو درایور را در حالت وصل قرار داده تا سرو درایور روشن شود. پس از روشن شدن سرو درایور باید LED های شماره ۱ و ۲ با فاصله زمانی ۱۰۰ میلی ثانیه شروع به چشمک زدن نماییند.
مرحله ۳: براساس قسمتهای قبل ابتدا حلقه کنترل جریان با تنظیم دستی ضرایب کنترلر PI و سپس حلقه کنترل سرعت مبتنی بر تاکو ژنراتور دی سی را تنظیم نمایید.
مرحله ۴: مطابق با جدول ۹-۱ با استفاده از فرماین 0x25 و 0x26 دقت Single و Multi انکودر مطلق مورد استفاده را تنظیم نمایید.

شکل ۱۰-۲۰: راهاندازی سرو درایور در مد کنترل موقعیت با انکودر مطلق با حلقه کنترل سرعت مبتنی با تاکو ژنراتور
مرحله ۵: در این مرحله بهتر است با استفاده از کلید قطع و وصل تغذیه سرو درایور را قطع و موقعیت دیپ سوئیچها رو مطابق شکل ۱۰-۲۱ قرار داده و مجدد تغذیه سرو درایور را متصل نمایید.

شکل ۱۰-۲۱: قرار دادن سرو درایور در مد کنترل موقعیت با انکودر مطلق با حلقه کنترل سرعت مبتنی با تاکو ژنراتور دی سی و حلقه کنترل جریان با تنظیم دستی ضرایب کنترلر PI
مرحله ۶: موقعیت پتانسیومترهای ACC.ramp، Kp.gain و Ki.gain را در ابتدای رنج قرار دهید (چرخش بر خلاف عقربههای ساعت). دیپ سوئیچ شماره ۶ را در حالت ON قرار دهید. سپس با تنظیم ولوم Kp و Ki و قرار دادن رفرنس موقعیت بر روی مقادیر مختلف سعی کنید به یک عملکرد مطلوب برسید. همچنین با تنظیم ولوم ACC میتوانید شتاب موتور را نیز تنظیم نماید. در آخر دیپ سوئیچ شماره ۶ را از حالت ON خارج کنید تا پارامترهای تنظیم شده بر روی حافظه طولانی مدت سرو درایور ذخیره شوند.
۱۱- ابعاد مکانیکی سرو درایور AMD60
ابعاد مکانیکی سرو درایور AMD60
دانلود راهنمای کاربری درایور AMD60
به منظور استفاده هر چه بهتر و صحیحتر از درایور AMD60، حتما دفترچه راهنمای آن که در لینک زیر قرار گرفته را دانلود و با دقت مطالعه نمایید.
جهت مشاهده نسخه آنلاین «راهنمای کاربری درایور AMD60» به تب «راهنمای کاربری» در همین صفحه مراجعه فرمایید.
برای استفاده هر چه بهتر از درایور AMD60، قبل از استفاده فیلمهای آموزشی زیر را مشاهده نمایید.
معرفی سرو درایور موتور دی سی AMD60
سرو درایور AMD60 از سری درایورهای موتور دیسی مغناطیس دائم میباشد. این سرو درایور قادر است گشتاور، سرعت و موقعیت موتور دیسی مغناطیس دائم را کنترل نماید. سرو درایور AMD60 با شناسایی خودکار پارامترهای الکتریکی موتور حلقه کنترل گشتاور را به صوت خود تنظیم برقرار مینماید. همچنین این سرو درایور با تخمین سرعت موتور نیاز به انکودر و سایر سنسورهای سرعت را حذف کرده و به صورت سنسورلس سرعت موتور را کنترل میکند به گونهای که با تغییر بار متصل به شفت موتور سرعت آن ثابت خواهد ماند. همچنین در سرو درایور AMD60 قابلیت اتصال تاکو ژنراتور، انکودر افزایشی و انکودر مطلق نیز فراهم میباشد. در سرو درایور AMD60 میتوان با اتصال مقاومت ترمزی به خروجی تعبیه شده مانع از افزایش ولتاژ باس به هنگام شتاب منفی و آسیب رسیدن به سرو درایور، منبع تغذیه و سایر المانهای موجود در سیستم شد
مدهای کنترلی سرو درایور AMD60
توضیح مدهای کنترلی سرو درایور AMD60
۱- مد کنترل گشتاور: مد کنترل گشتاور دستی، مد کنترل گشتاور خود تنظیم
۲- مد کنترل سرعت: مد کنترل سرعت مبتنی بر سنسور(تاکو ژنراتور، انکودر)، مد کنترل سرعت سنسورلس
۳- مد کنترل موقعیت
راه اندازی سریع سرو درایور AMD60
دراین ویدئو راه اندازی سریع درایور AMD60 را بررسی میکنیم.
راه اندازی سرو درایور AMD60 در مد کنترل سرعت مبتنی بر تاکو ژنراتور دی سی
راه اندازی سرو درایور AMD60 در مد کنترل موقعیت
در مد کنترل موقعیت سرو درایور قادر است با استفاده از انکودر افزایشی و یا مطلق، موقعیت موتور دیسی مغناطیس دائم را به طور دقیقی کنترل نماید. مد کنترل موقعیت مناسب سیستمهایی میباشد که نیازمند موقعیتدهی دقیق میباشند. از جمله دستگاههای CNC، بازوهای رباتیک و نمونه کاربردهایی هستند که نیاز به کنترل موقعیت دقیق دارند.
راه اندازی سرو درایور AMD60 از طریق پروتکل USB
راه اندازی سرو درایور AMD60 در مد کنترل گشتاور خود تنظیم
شرایط گارانتی محصولات شرکت ربات سازان
این محصول دارای ۸ ماه گارانتی میباشد. چنانچه محصول تحت شرایط کار نامی خود به مشکل بخورد شرکت بدون دریافت هزینه اشکالات احتمالی را برطرف خواهد کرد.
شرایط ابطال گارانتی:
۱- آسیب دیدن در اثر جریان بیش از حد که باعث ذوب شدن مسیرهای برد مدار چاپی محصول خواهد شد. درایور دارای یک جریان دهی دائمی و یک جریان دهی لحظهای میباشد. هرگز نباید جریانی که به صورت پیوسته از درایور عبور میکند از جریان دهی دائمی آن بیشتر شود. حتما قبل از تغذیه درایور یک عدد فیوز قرار دهید. جریان فیوز نباید بیشتر از جریان دهی دائمی درایور باشد.
۲- آسیب دیدن در اثر شرایطی که اتصال کوتاه در خروجی درایور رخ دهد. اگر سیمهای موتور دارای پارگی باشند و به یکدیگر متصل شوند اتصال کوتاه در خروجی موتور درایور رخ میدهد که باعث آسیب رسیدن به درایور خواهد شد.
۳- آسیب دیدن تحت شرایطی که یکی از خروجیهای موتور درایور به زمین یا تغذیه اتصال یابد.
۴- آسیب دیدن در اثر استفاده از درایور در محیطهای مرطوب و یا پر از گرد و غبار و پلیسههای رسانا. استفاده از درایور در محیطهای مرطوب میتواند منجر به نفوذ رطوبت به داخل درایور گردد. این رطوبت میتواند در قطعاتی که فاصله پایههای آن بسیار نزدیک به هم میباشد رسانایی ایجاد کرده و منجر به صدمه رساندن به درایور شود. همچنین نفوذ گرد و غبار به تشدید این شرایط کمک خواهد کرد. استفاده از درایور در دستگاههای ماشین کاری فلزات میتواند منجر به نفوذ پلیسه به داخل درایور و ایجاد اتصال کوتاه در بین پایههای قطعات گردد. در چنین شرایطی باید حتما درایور داخل یک قاب دیگر که مقاوم در برابر رطوبت و نفوذ گرد و غبار و پلیسه هست قرار گیرد.
۵- در صورتیکه درایور به هر دلیلی به مشکل خورده است و مشتری اقدام به باز کردن قاب درایور و دستکاری سخت افزاری آن نماید.
۶- چنانچه مشتری اقدام به سوراخکاری قسمتی از بدنه و یا هیت سینک نماید و درایور دچار آسیب شود. دلیل صدمه دیدن درایور تحت این شرایط میتواند ناشی از نفوذ پلیسه به داخل درایور و یا خراب شدن قطعات در اثر ارتعاش ناشی از سوراخکاری باشد.
۷- آسیب دیدن درایور در اثر اضافه ولتاژ ایجاد شده به هنگام کاهش سرعت با نرخ بالا. چنانچه باری که به شفت موتور متصل کردهاید دارای ممان اینرسی بالایی باشد به هنگام ترمزگیری شدید توان مکانیکی موجود در ممان دوار به سمت درایور جاری شده و باعث افزایش ولتاژ در لاین خط تغذیه میشود. اگر سطح ولتاژ به حدی افزایش یابد که بیشتر از حد تحمل درایور گردد میتواند منجر به آسیب رساندن به درایور شود. در صورتیکه باری با ممان اینرسی بالا دارید و ناچار هستید با نرخ بالا عمل کاهش سرعت را انجام دهید حتما باید از مقاومت ترمزی مناسب استفاده کنید. اگر امکان استفاده از مقاومت ترمزی وجود ندارد باید کاهش سرعت را با نرخی انجام دهید که هرگز اضافه ولتاژ ایجاد شده بیشتر از حد تحمل درایور نگردد. برخی از درایورهای شرکت ربات سازان دارای یک ولوم تنظیم شتاب میباشند که با استفاده از این ولوم میتوانید شیب افزایش و یا کاهش سرعت را تنظیم نمایید.
۸- آسیب رسیدن به درایور در اثر جابهجا زدن پلاریته تغذیه درایور. به هنگام اتصال تغذیه همواره به پلاریته آن دقت نمایید.
۹- آسیب رسیدن به درایور در اثر وصل کردن تغذیه به خروجی موتور!
۱۰- آسیب رسیدن به درایور در اثر وصل کردن آن به تغذیهای با ولتاژی بیشتر از ولتاژ نامی درایور.
محصولات مرتبط
-
درایور موتور دی سی AMD10
۳,۳۴۸,۰۰۰ تومان -
درایور موتور دی سی و استپر MDC20
برای قیمت تماس بگیرید -
درایور MD5
برای قیمت تماس بگیرید
نقد و بررسیها
هنوز بررسیای ثبت نشده است.